

Multi-robot path planning method based on three-dimensional space intensive storage region
A storage area and three-dimensional space technology, applied in the field of mobile robots, can solve problems such as incoherent and incoherent tasks before and after tasks, and pauses at the elevator robot entrance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
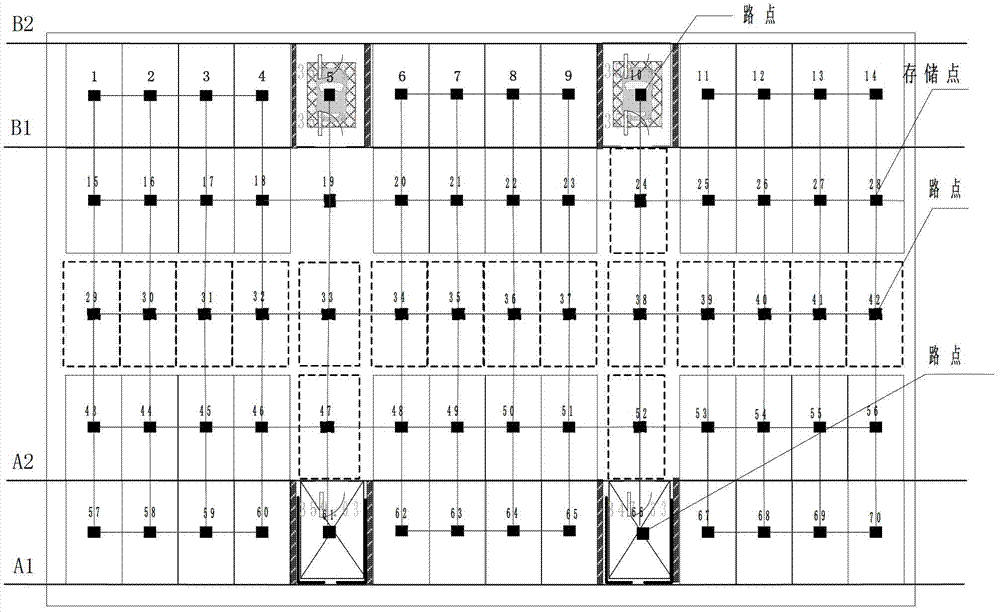
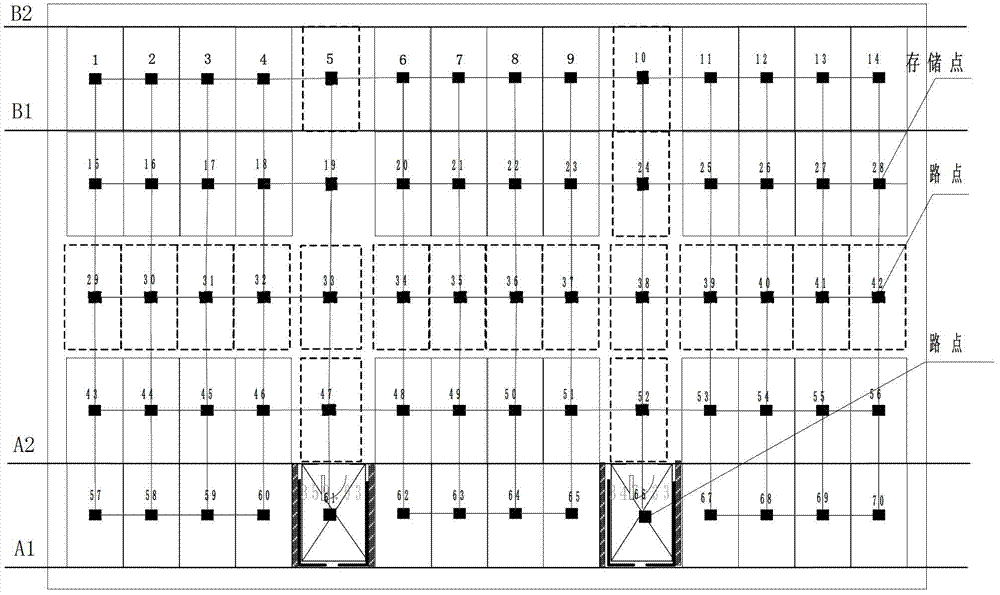
[0057] A multi-robot path planning method based on a three-dimensional space-intensive storage area is based on the following path planning conditions: (1) the multi-robot path planning mainly solves collision and conflict problems; Robots and elevator robots; (3) the collision and conflict of mobile robots not only come from the collision and conflict in the horizontal plane but also from the collision and conflict in the vertical plane; (4) the collision and conflict of mobile robots refer to the Task deadlock occurs (walking toward each other in the horizontal plane and facing toward each other in the vertical plane); (5) the mobile robot constitutes a dynamic obstacle for other robot members; (6) the wireless communication between the mobile robot and the scheduling server network for communication.
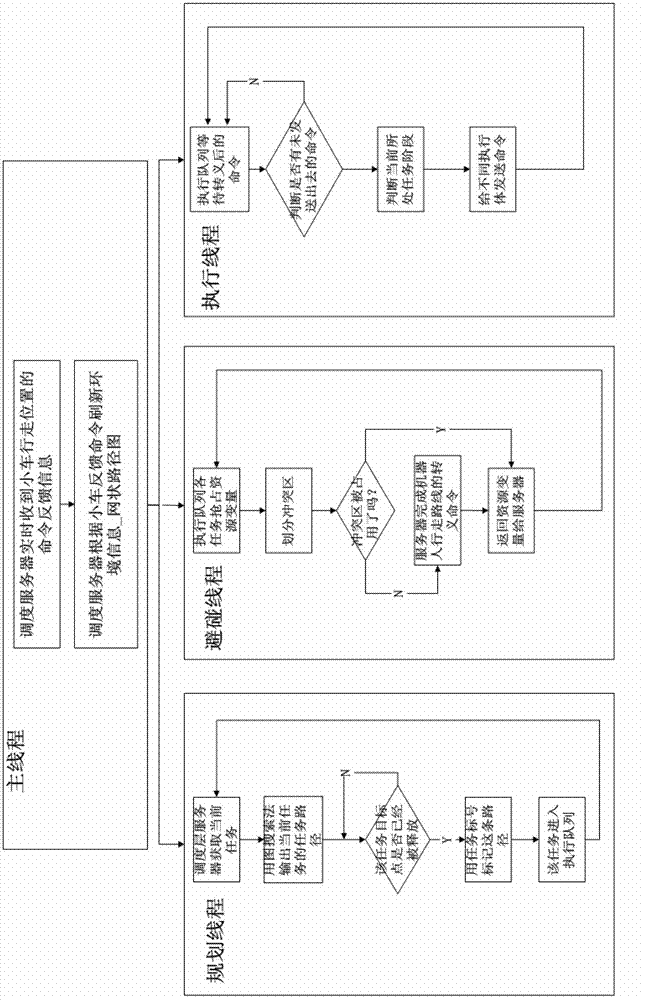
[0058] Such as figure 1 As shown, a multi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More