

Rapid planning method for surface global path of planet
A planetary surface and path technology, applied in the field of deep space exploration, can solve problems such as limited application scope, complex implementation, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to better illustrate the purpose and advantages of the present invention, the technical content will be further described below in conjunction with the embodiments and accompanying drawings.
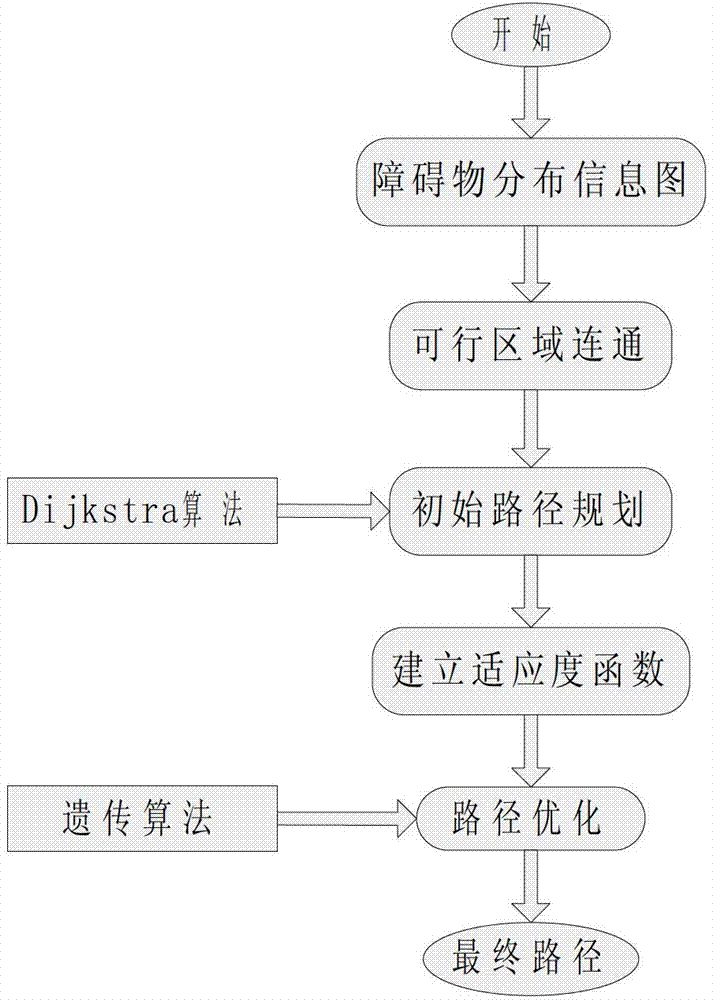
[0035] In this embodiment, the specific implementation steps of the hybrid path planning method combining the Dijkstra algorithm and the genetic algorithm are as follows:
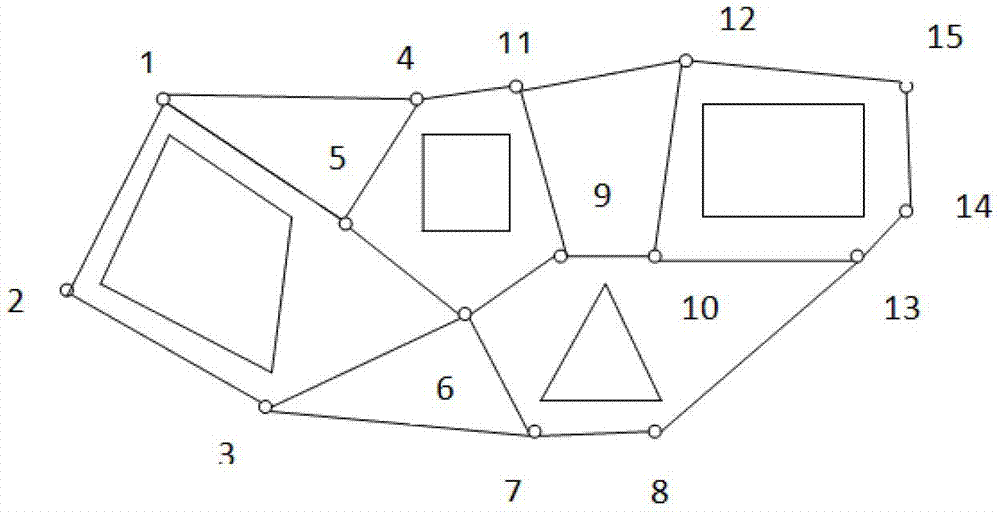
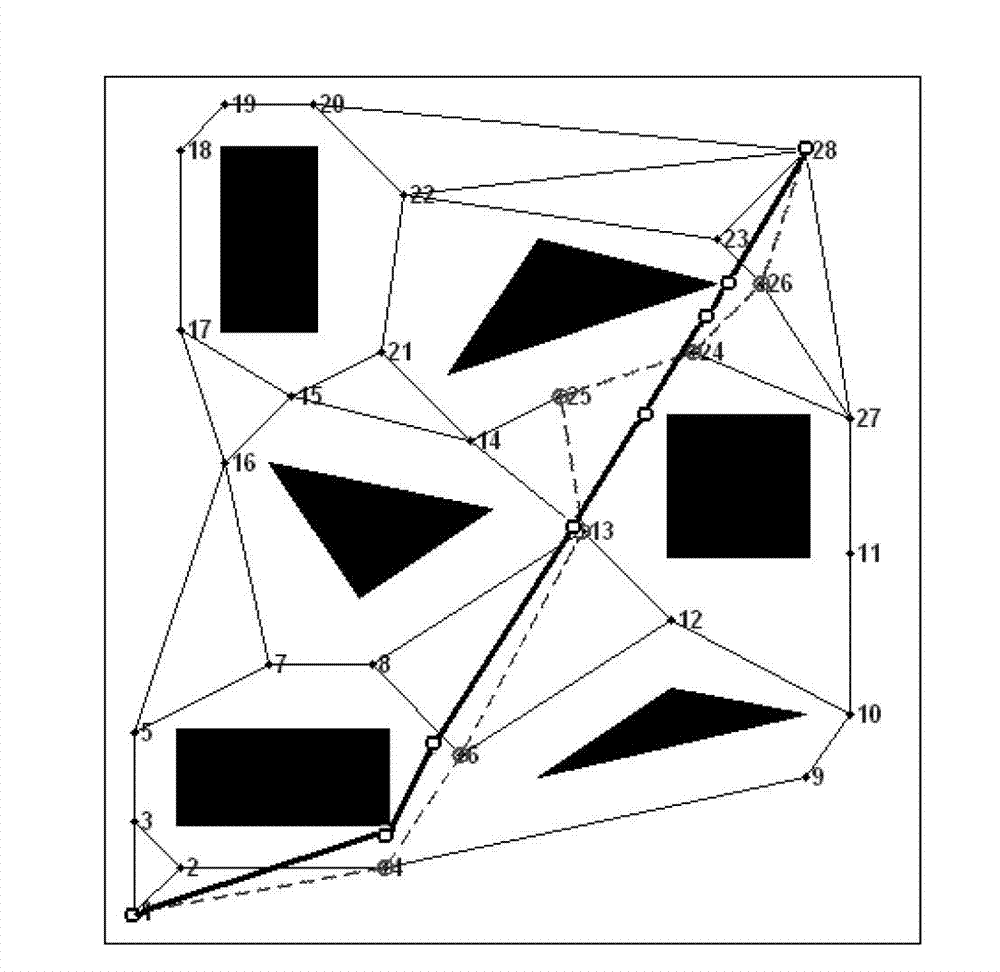
[0036] (1) Obtain the obstacle distribution information map in the area to be planned for path planning, analyze and process the obtained obstacle distribution information map, select some feasible nodes in the feasible area that can avoid obstacles, and perform feasible area analysis on these nodes. The connectivity within, the selection of nodes in this embodiment and the connectivity within the feasible region meet the following conditions:
[0037] a. The selection of nodes satisfies the linear mathematical constraints y k =cx k +d(a k k k ), (x k ,y k ) is the global coordinate of the kth nod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More