

Monocular vision and binocular vision switching device for small robot
A technology of monocular vision and binocular vision, applied in the field of robot vision, can solve problems such as troublesome installation and maintenance, large weight and volume, troublesome image processing, etc., and achieve good reconstruction effect, wide application and sensitive movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Describe the present invention below in conjunction with specific embodiment:
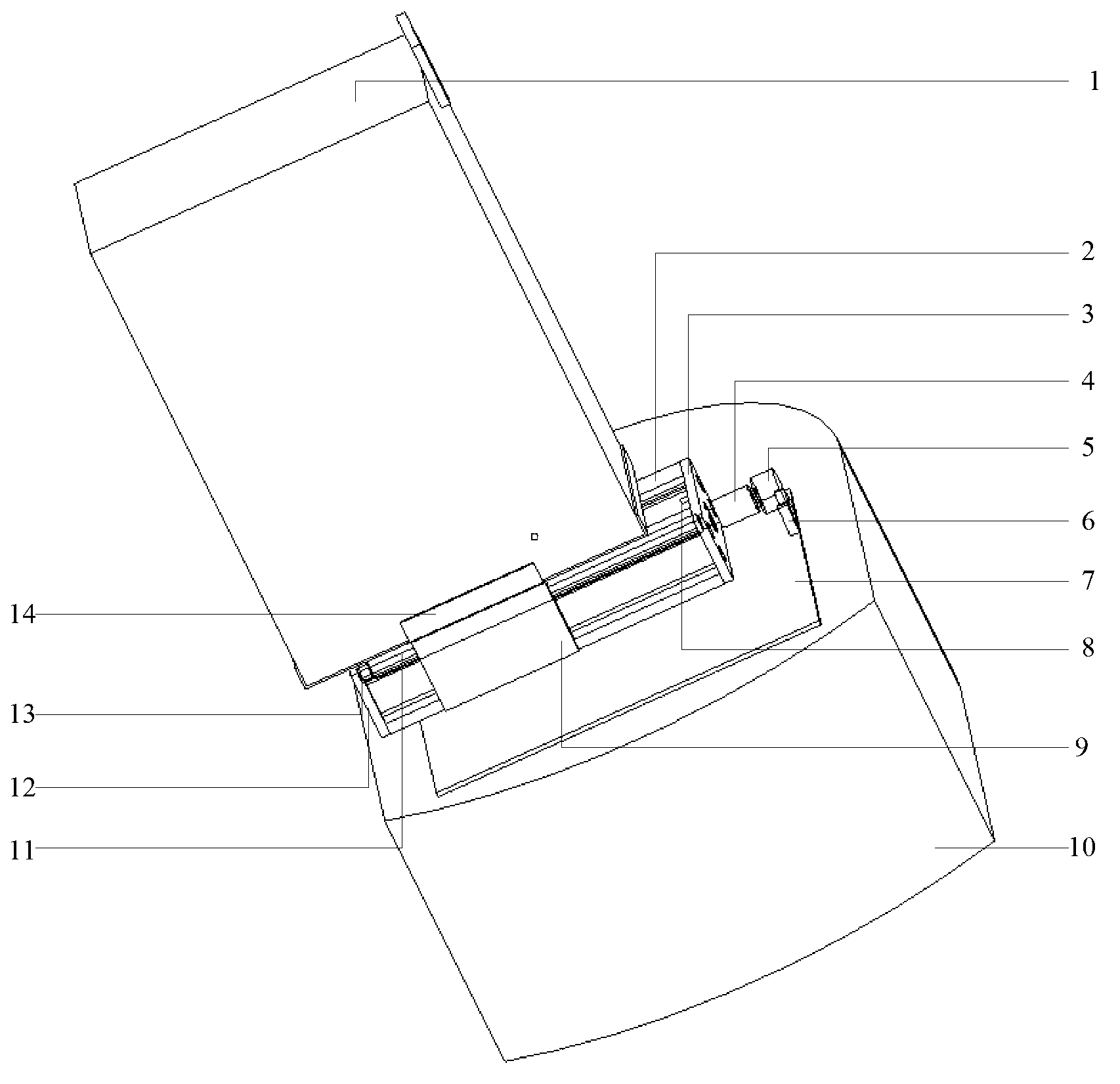
[0030] This embodiment is a monocular vision and binocular vision conversion device for a small robot, which consists of a wireless communication camera 1, a transmission component, a power component and a control component.
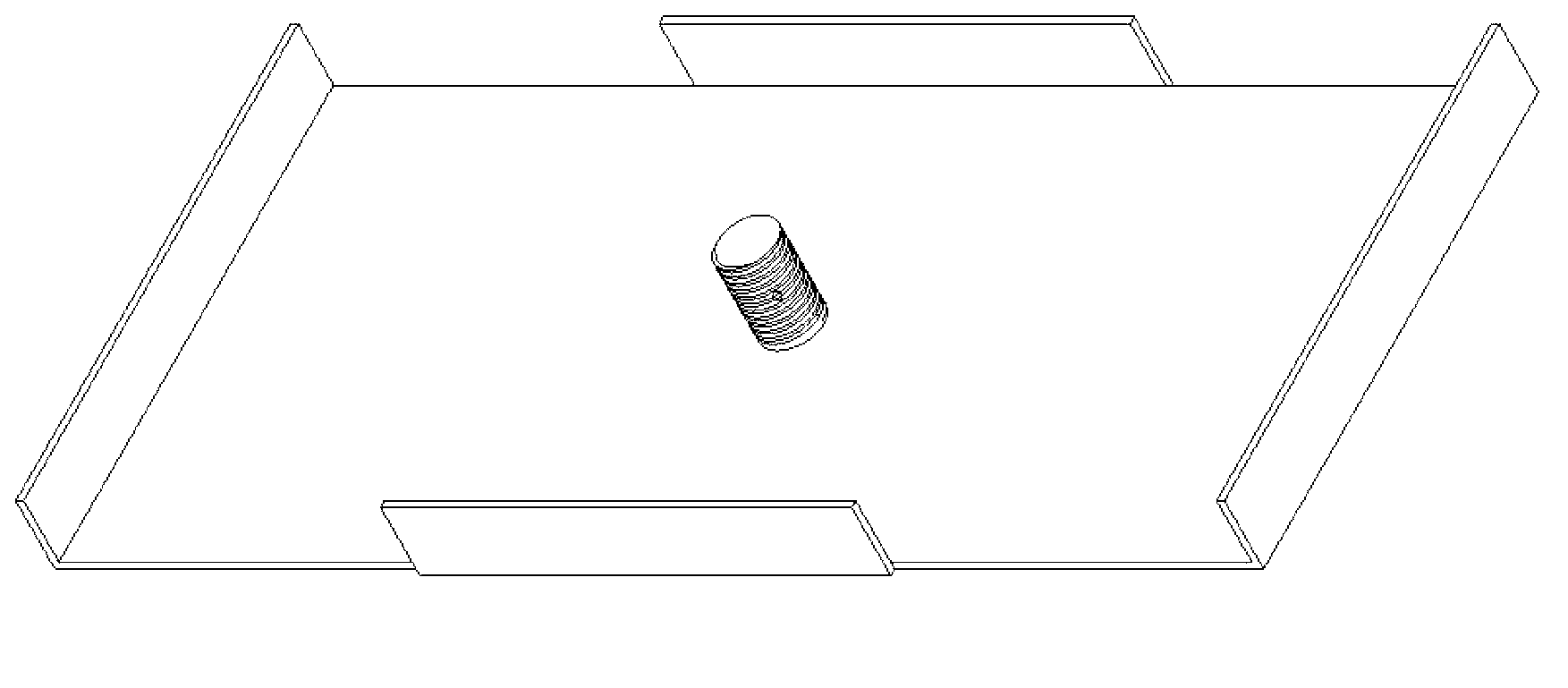
[0031] Refer to appendix 1 and appendix figure 2 , the wireless communication camera is connected with the screw in the middle of the camera fixing plate 14 through the threaded hole at the bottom, and the movement of the wireless communication camera is restricted by the cards around the camera fixing plate, thereby the wireless communication camera is fixed on the camera fixing plate.
[0032] The transmission assembly is composed of a rotary motion-to-linear motion assembly and guide rails. In this embodiment, the rotary motion part of the transmission assembly is a screw 11, and the linear motion part is a slider 9. There is a threaded through hole in the middle o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More