

Method and system for processing point cloud data
A point cloud data and processing method technology, applied in the field of surveying and mapping, can solve the problems of increasing data analysis and storage, fully automatic processing of point cloud troubles, and easy loss of detailed information, so as to reduce redundancy and improve accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
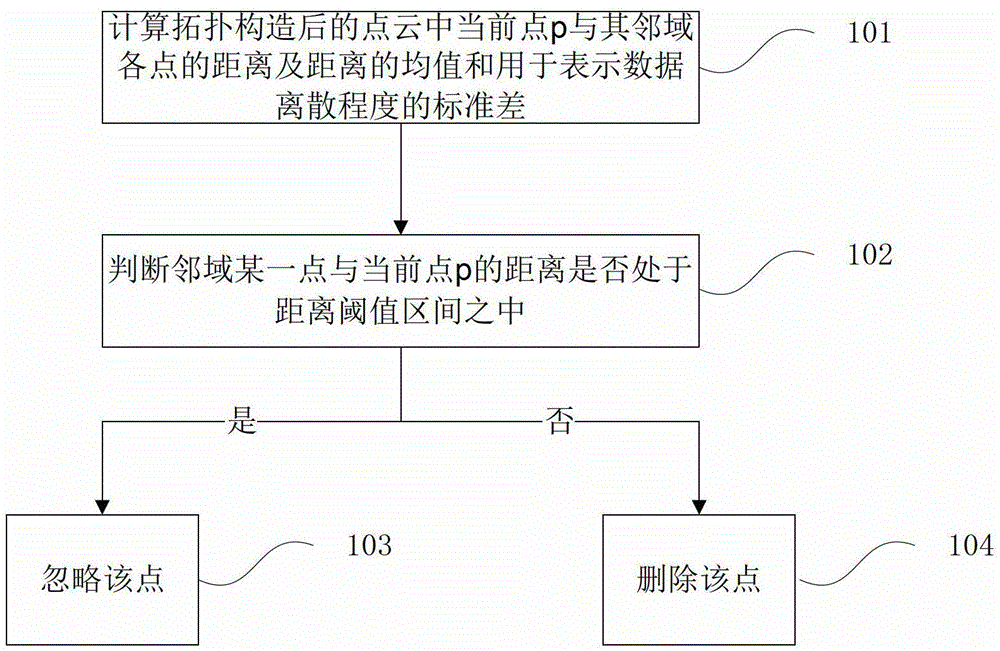
[0028] figure 1 A flow chart of a method for processing point cloud data provided by Embodiment 1 of the present invention mainly includes the following steps:
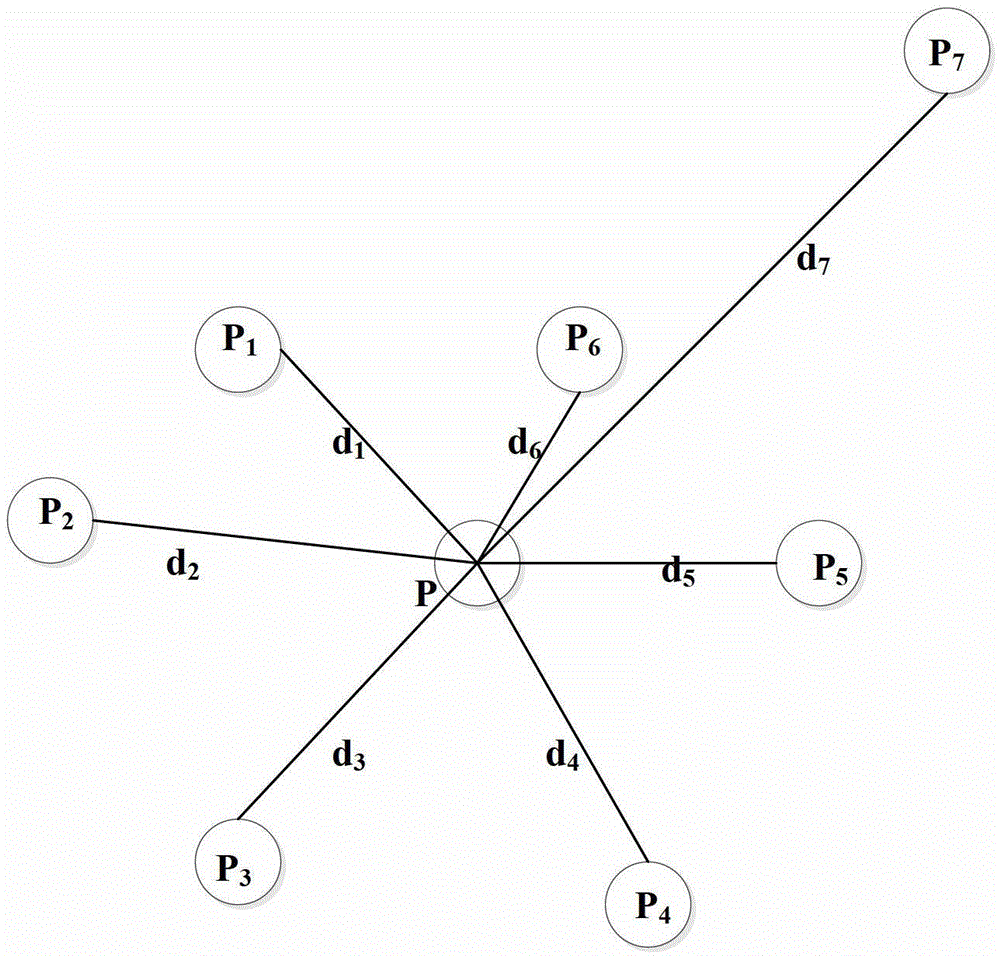
[0029] Step 101. Calculate the distance between the current point p and its neighboring points in the topologically constructed point cloud, the mean value μ of the distance, and the standard deviation σ used to represent the degree of data dispersion.
[0030] The point cloud data is the contour data of the measured object obtained by scanning the measured object with a 3D laser scanner. For example, use a 3D laser scanner to scan a vertical wall. In theory, if the wall is absolutely smooth, the scanned point cloud data should be on the same plane. However, due to the errors of the 3D laser scanner itself, the surface reflectivity of the measured object (generally determined by the material) and the suspended solid particles and other factors, the surface of the measured object's shape data will be attached to a num...
Embodiment 2
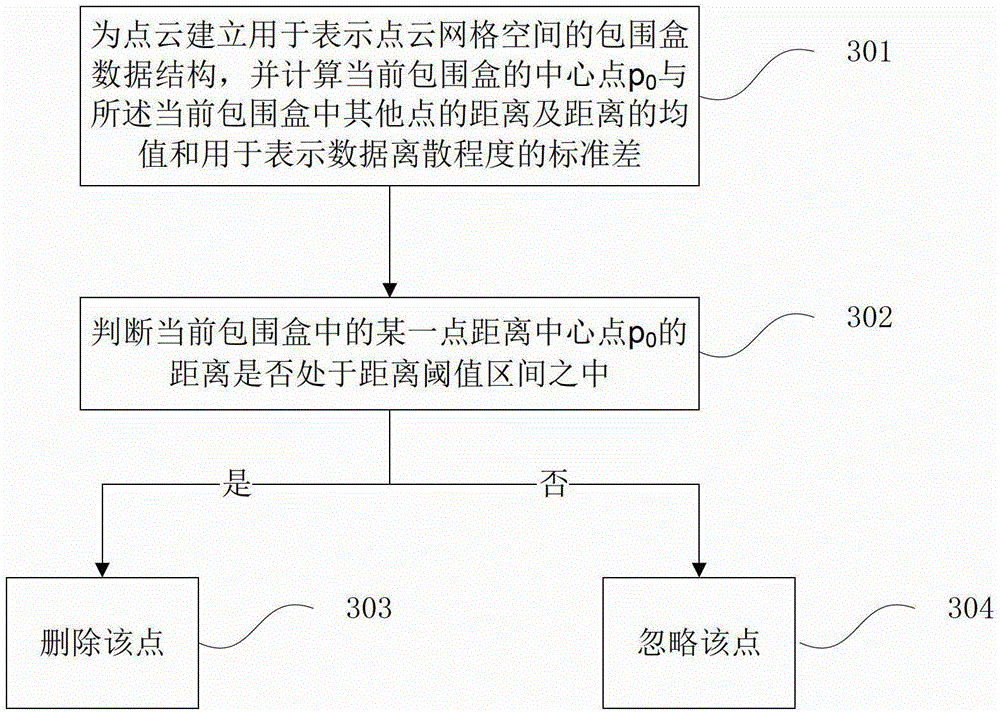
[0042] Embodiment 1 of the present invention introduces a method for removing neighborhood noise points according to a distance threshold, and this embodiment further processes point cloud data in combination with the method of Embodiment 1. Since the first four steps are consistent with the steps in Embodiment 1, they will not be described in detail. This embodiment only further introduces the subsequent steps, such as image 3 As shown, it mainly includes the following steps:
[0043] Step 301. Establish a bounding box data structure for the point cloud to represent the grid space of the point cloud, and calculate the center point p of the current bounding box 0 The distance from other points in the current bounding box and the mean value μ of the distance 0 and the standard deviation σ used to represent the degree of dispersion of the data 0 .
[0044] The point cloud data collected by the 3D laser scanner is more and more accurate than the data obtained by conventional ...
Embodiment 3
[0055] A processing system for point cloud data provided by an embodiment of the present invention, the system mainly includes:
[0056] The first calculation module 51 is used to calculate the distance between the current point p in the topologically constructed point cloud and its neighboring points and the mean value μ of the distance and the standard deviation σ used to represent the degree of data dispersion;
[0057] The noise point processing module 52 is used to judge whether the distance between a certain point in the neighborhood and the current point p is in the interval μ±α·σ, where α is the coefficient of the distance threshold; if so, ignore it; otherwise, delete the point;
[0058] Bounding box establishment module 53, is used for establishing the bounding box data structure that is used to represent point cloud grid space for point cloud;
[0059] The second calculation module 54 is used to calculate the center point p of the current bounding box 0 The distanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More