

Calibration method of pose position-free constraint line laser monocular vision three-dimensional measurement sensor parameters
A technology of sensor parameters and three-dimensional measurement, applied in measuring devices, instruments, optical devices, etc., can solve the problems of complex target production, mechanical errors, and operation restrictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings.
[0032] The three-dimensional measurement sensor calibrated by the method of the invention is a line laser monocular vision three-dimensional measurement sensor used for on-line detection of industrial production lines. The sensor includes a monocular camera and a line laser projector.
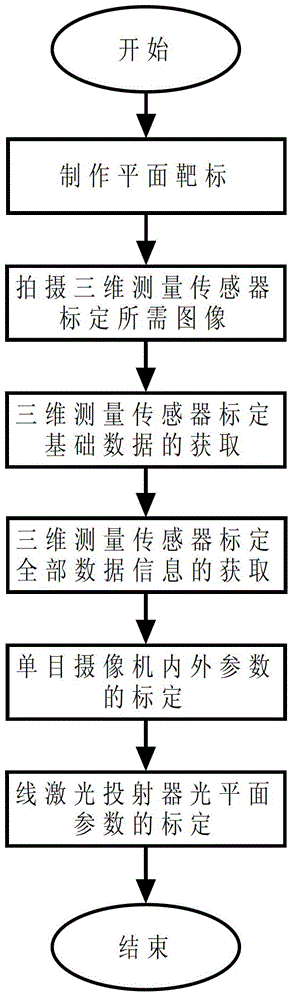
[0033] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the specific implementation steps of the calibration method of the present invention are as follows:
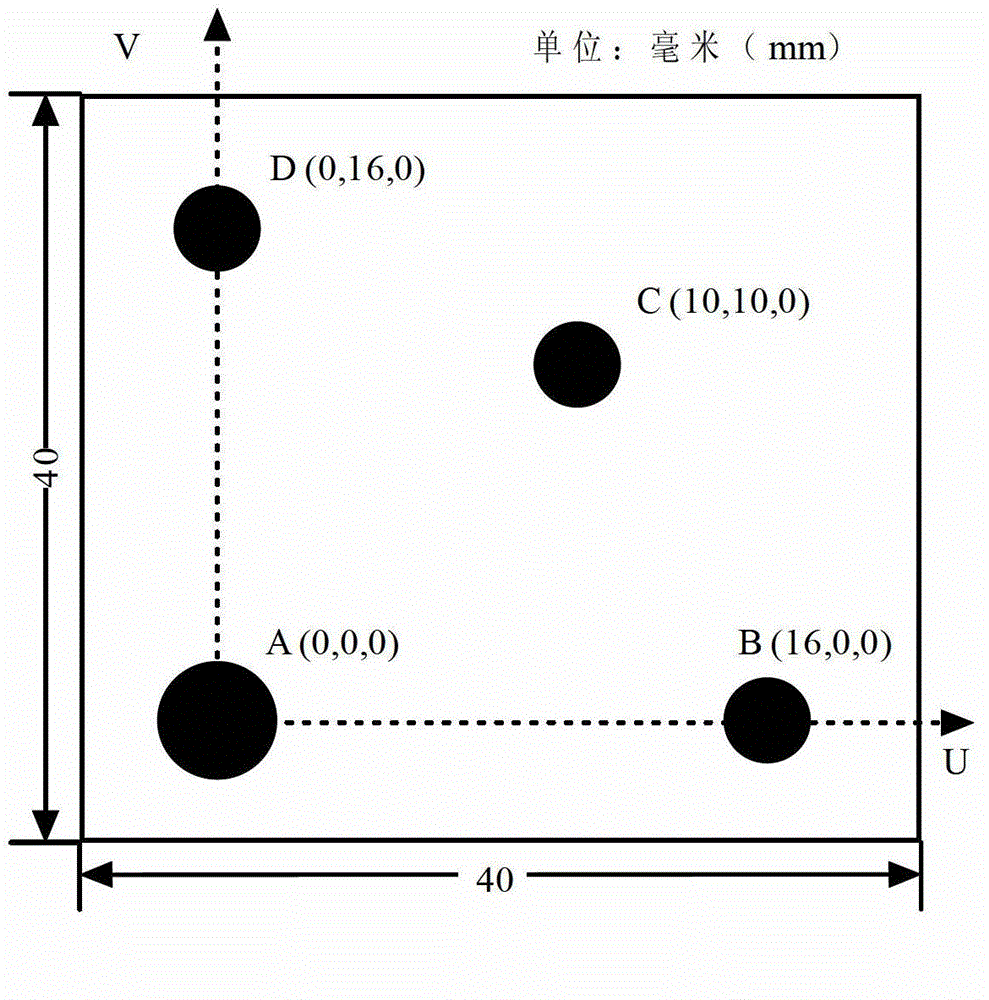
[0034] 1) Make a planar target. Make a flat target with white as the background color, the target size is 40×40mm, and four black mark circle patterns are distributed on the target according to the marked positions, one large diameter mark circle has a diameter of 5mm, and three small diameter mark circles of the same diameter The diameter is 3mm; the centroid B is located 16mm to ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More