

A multi-camera global calibration device and method without a common view field based on a camera group
A public field of view, multi-camera technology, applied in the field of visual measurement, can solve the problems of difficult to obtain clear images, cumbersome operation, difficult target operation, etc., and achieve the effect of solving limited space public constraints, improving calibration accuracy, and stable and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
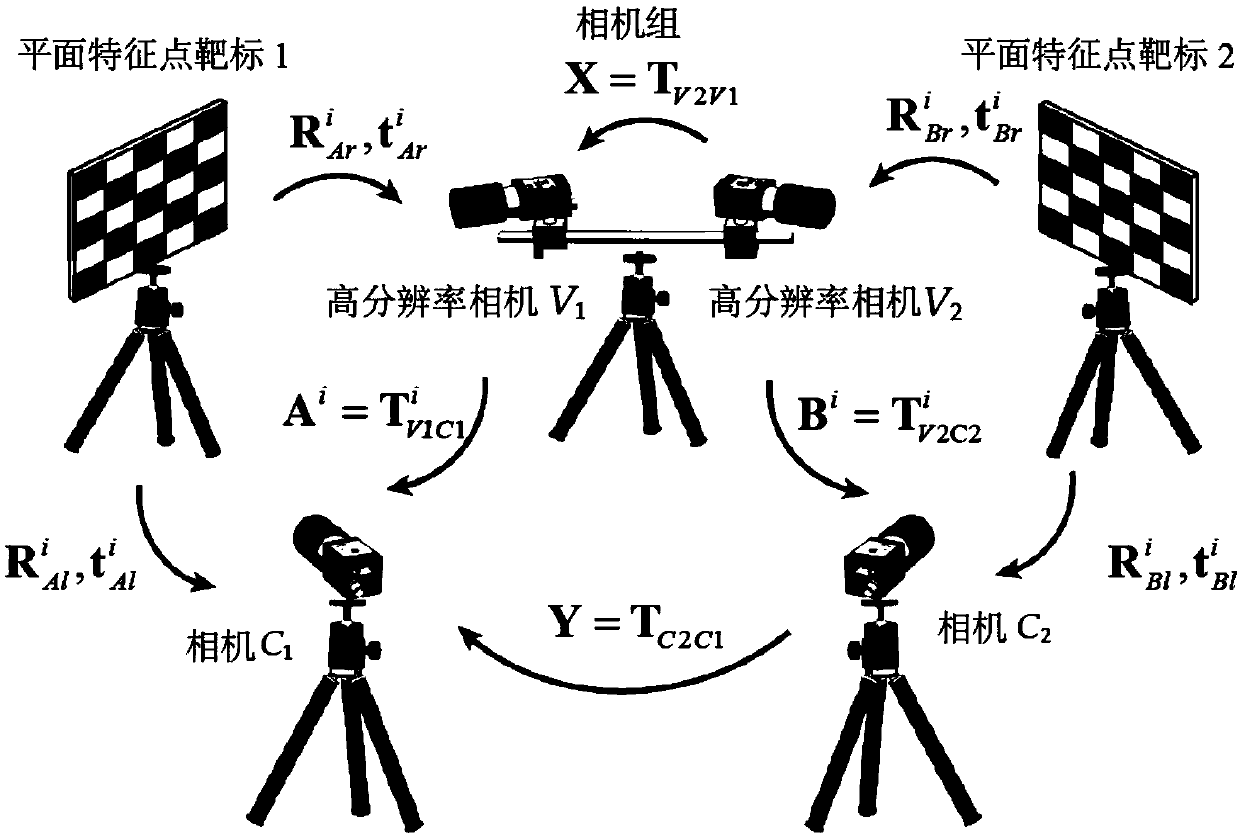
[0112] The model of the two cameras without a common field of view to be calibrated is Allied Vision Technologies, equipped with a Schneider optical lens with a focal length of 17mm, and the image resolution is 1600×1200 pixels. The two high-resolution cameras that constitute the camera group are modeled as MER-1070 -14U3M / C, the image resolution is 3840×2748 pixels. The distance between adjacent feature points of two planar feature point targets is 10mm, and the position accuracy is 2um, such as Figure 5 .
[0113] First, according to the method described in step 11, the camera internal parameter calibration result is obtained as follows:
[0114]
[0115] According to the method described in step 12, there are 144 calibration images collected, 136 images after screening, and the remaining calibration images are used for calibration;
[0116] According to the method described in step 13, the external parameters of the two cameras without a common field of view to be cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More