

Irregular-island-based method for planning covered flight route of unmanned aerial vehicle
A trajectory planning and irregular technology, applied in the field of UAV coverage trajectory planning based on irregular islands, can solve problems such as large amount of calculation, long planning time, local optimal solution, etc., and achieve the effect of meeting high requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The UAV coverage route planning method based on irregular sea islands of the present invention comprises the following steps:
[0030] (1) Extract the circumscribed polygon of the irregular island;
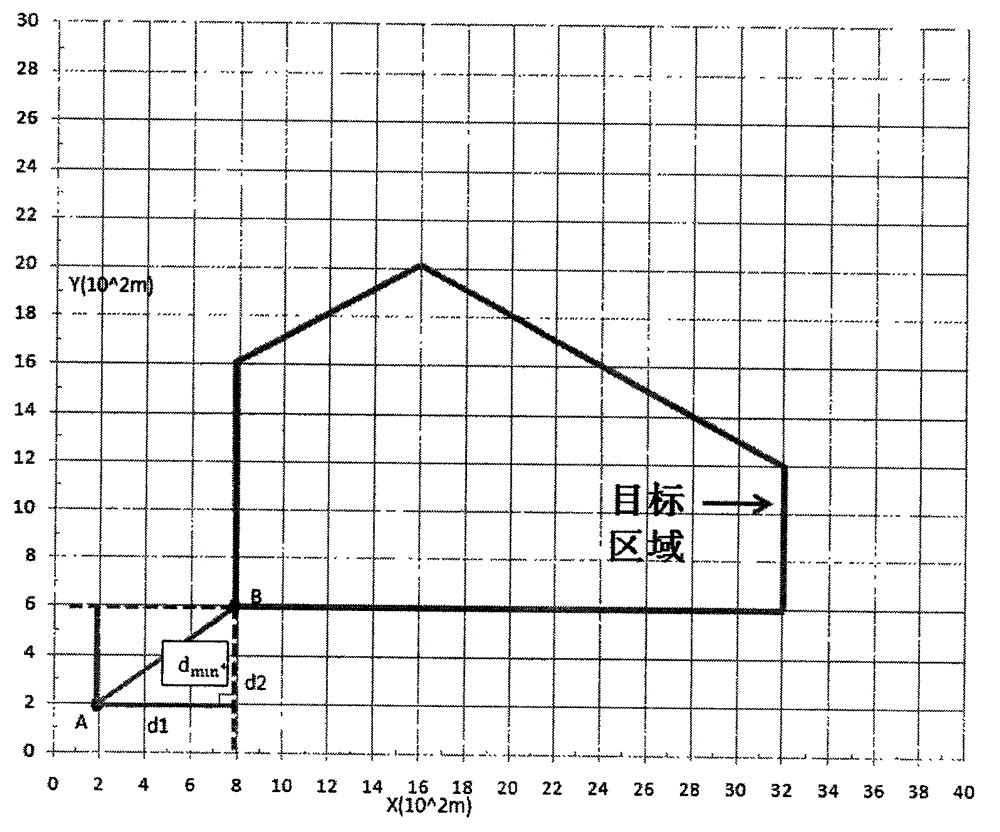
[0031] (2) Calculate its minimum span according to the circumscribed polygon, and determine the flying direction of the UAV to reduce the number of turns;
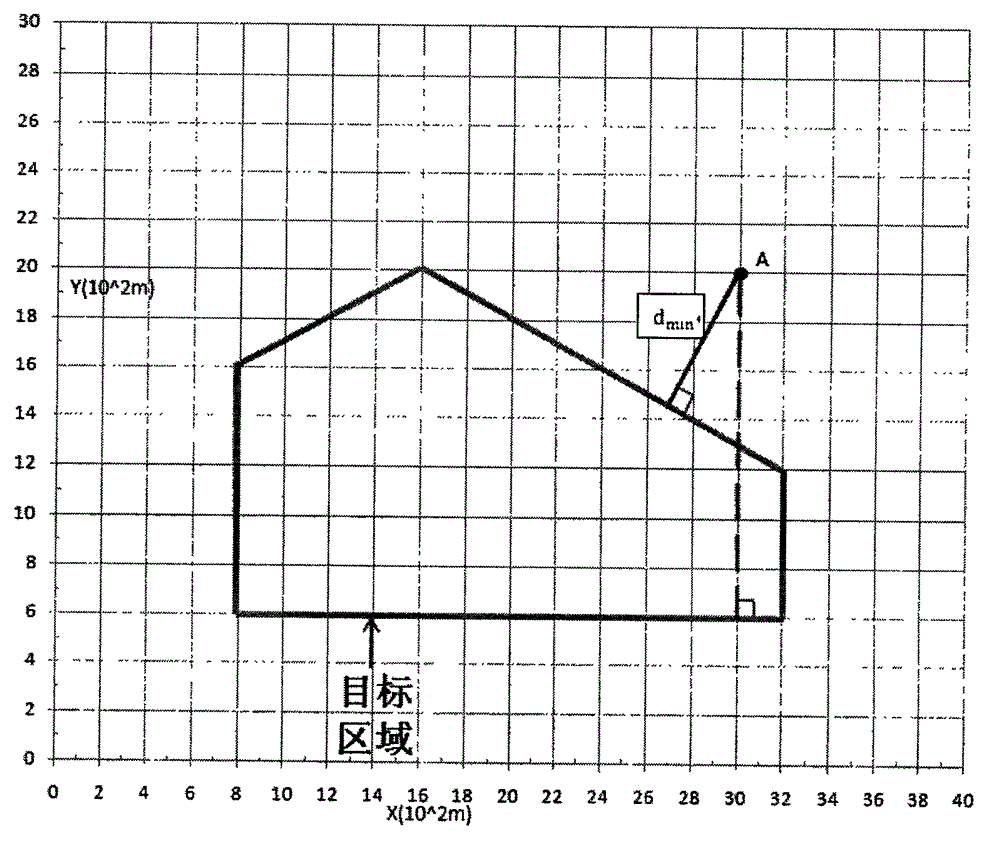
[0032] (3) Calculate the flight altitude according to the terrain conditions near the island, and determine the shortest distance from the take-off point to the circumscribed polygon of the island;
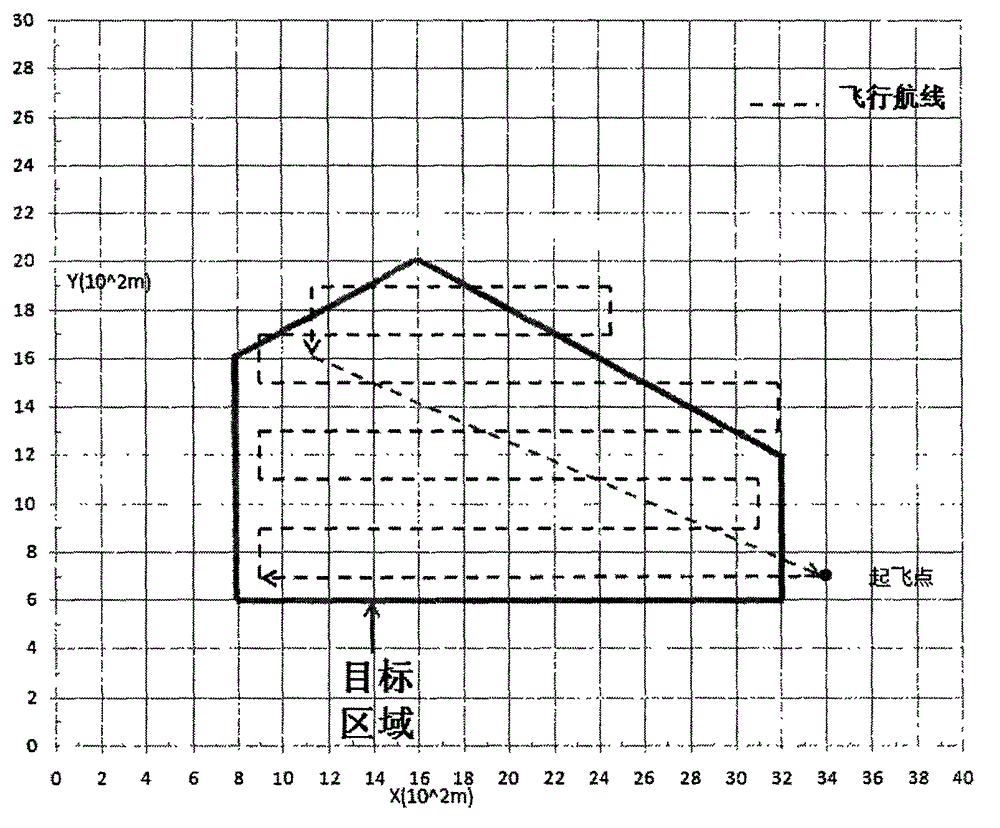
[0033] (4) Considering the number of turns, the minimum span of the polygon and the shortest distance from the takeoff point to the island to calculate the minimum route distance to obtain the optimal loop route.
[0034] 1. Selection of circumscribed polygons of irregular islands
[0035]Due to the irregular shape of most sea islands, for the wide application of this method, the present invention proposes a normalization...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More