Method for processing space hand signal gesture command based on depth camera
A depth camera and space gesture technology, applied in image data processing, instruments, computing, etc., can solve the problems of large computing data, complex device structure, and inability to acquire data accurately and quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
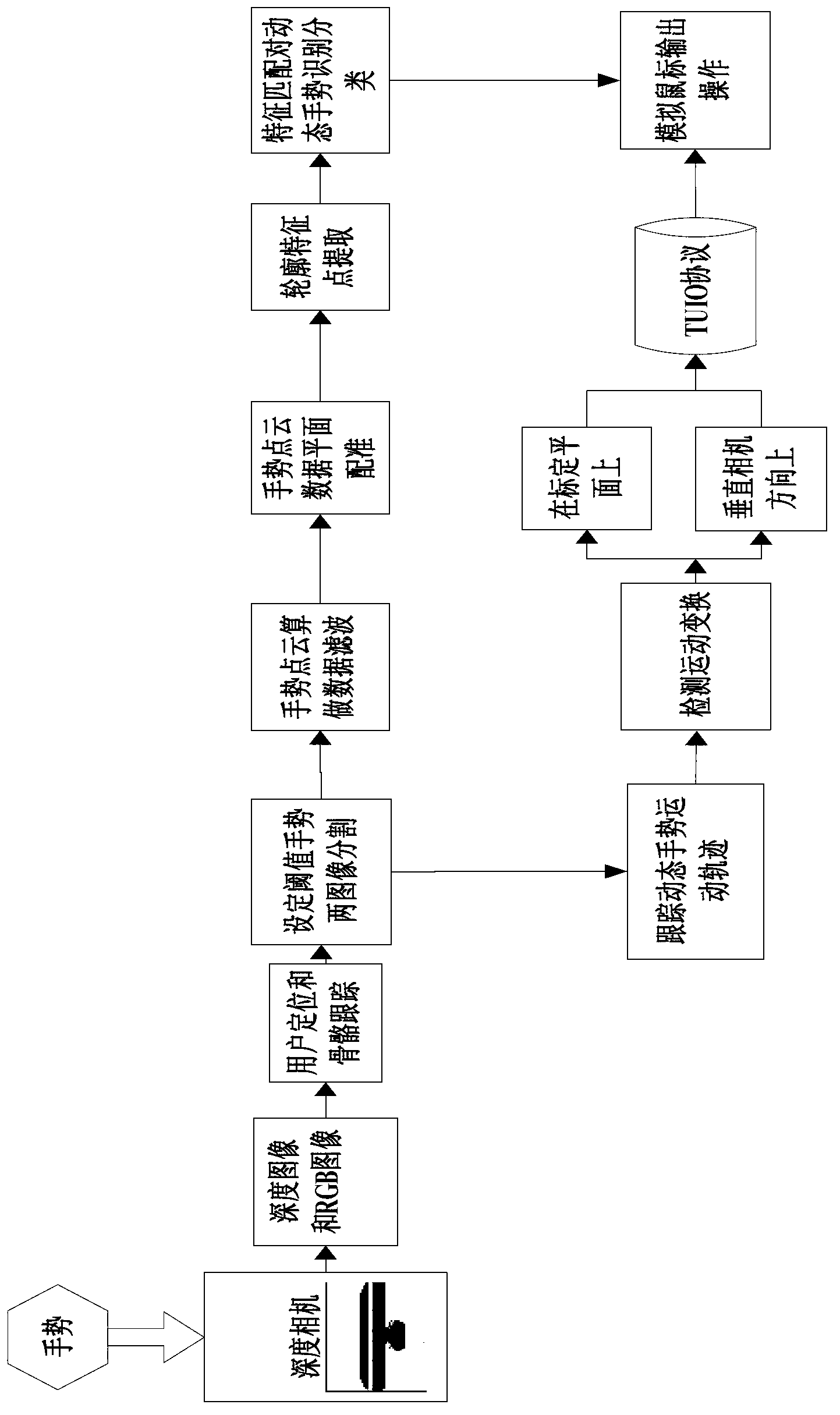
[0031] The present invention as Figure 1-2 shown, including the following steps:
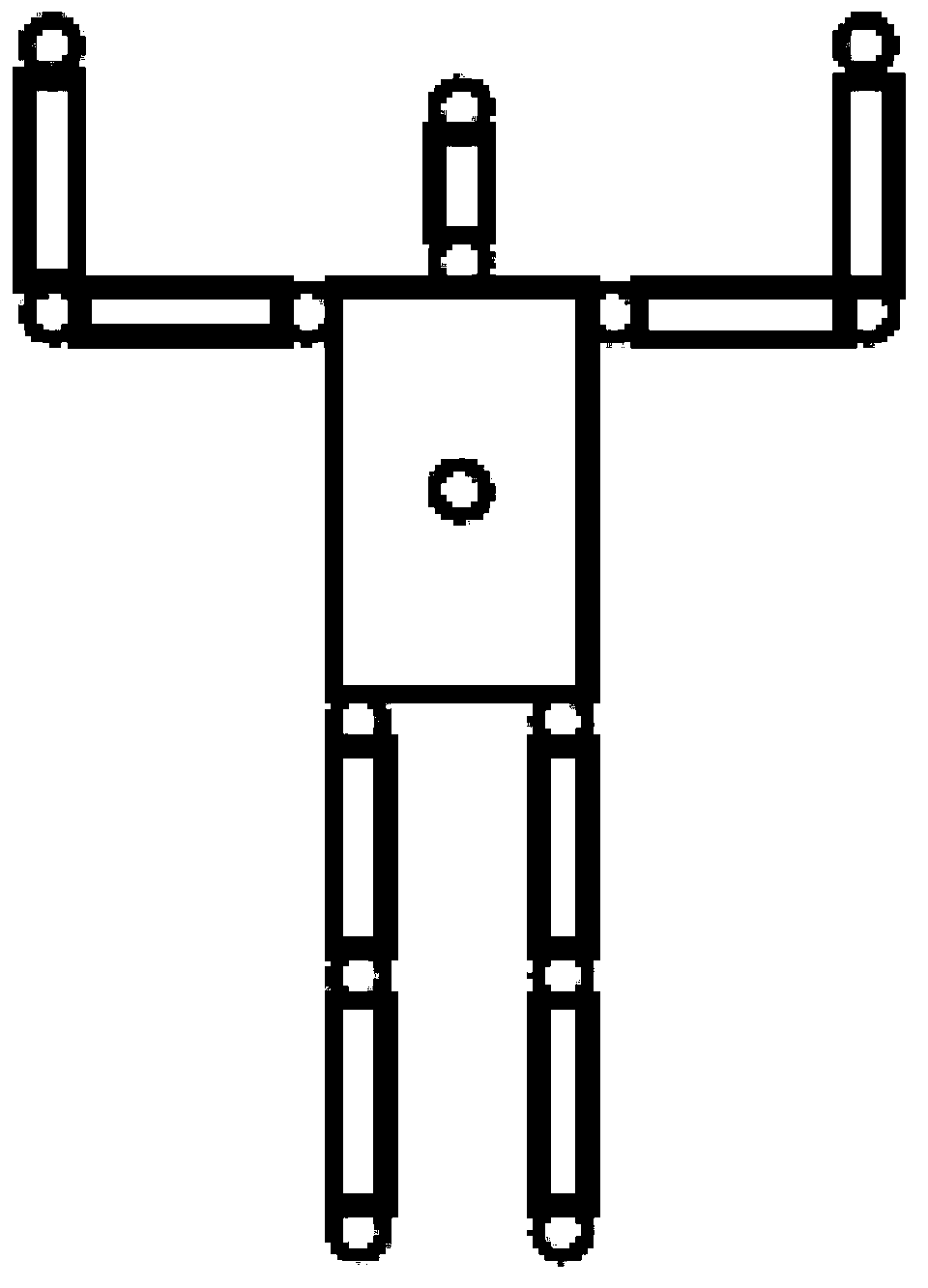
[0032] The first step is to obtain real-time images through the depth camera, and the images include depth images and RGB color images;
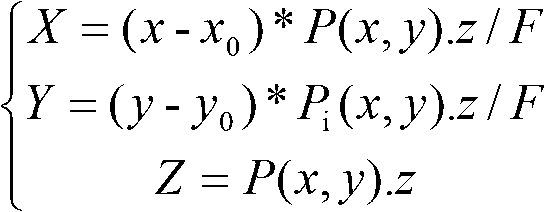
[0033]The depth camera is a camera based on the principle of structured light encoding and capable of collecting RGB images and depth images. The depth image includes two-dimensional XY coordinate information of the scene, and pixel depth value information reflecting the distance from the camera in the scene. The depth value is represented by the infrared light ranging receiving reflection distance of the IR camera, which is expressed as a gray value in the depth image; the greater the depth value, the farther the distance from the camera plane in the corresponding actual scene, that is, the closer the camera is. The larger the depth value.
[0034] When using the depth camera to capture images, the frame rate is set to 30FPS, and the size of the images ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More