Flexible endoscope robot with variable rigidity
An endoscopic robot and variable technology, applied in the fields of endoscopy, medical science, diagnosis, etc., can solve the problems of memory alloy or airflow drive difficult to precisely control, patient discomfort, safety hazards, etc., to reduce interaction , the effect of enhancing the range of action and reducing discomfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The embodiments of the present invention are described in detail below: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation and specific operation process are provided, but the protection scope of the present invention is not limited to the following implementation example.
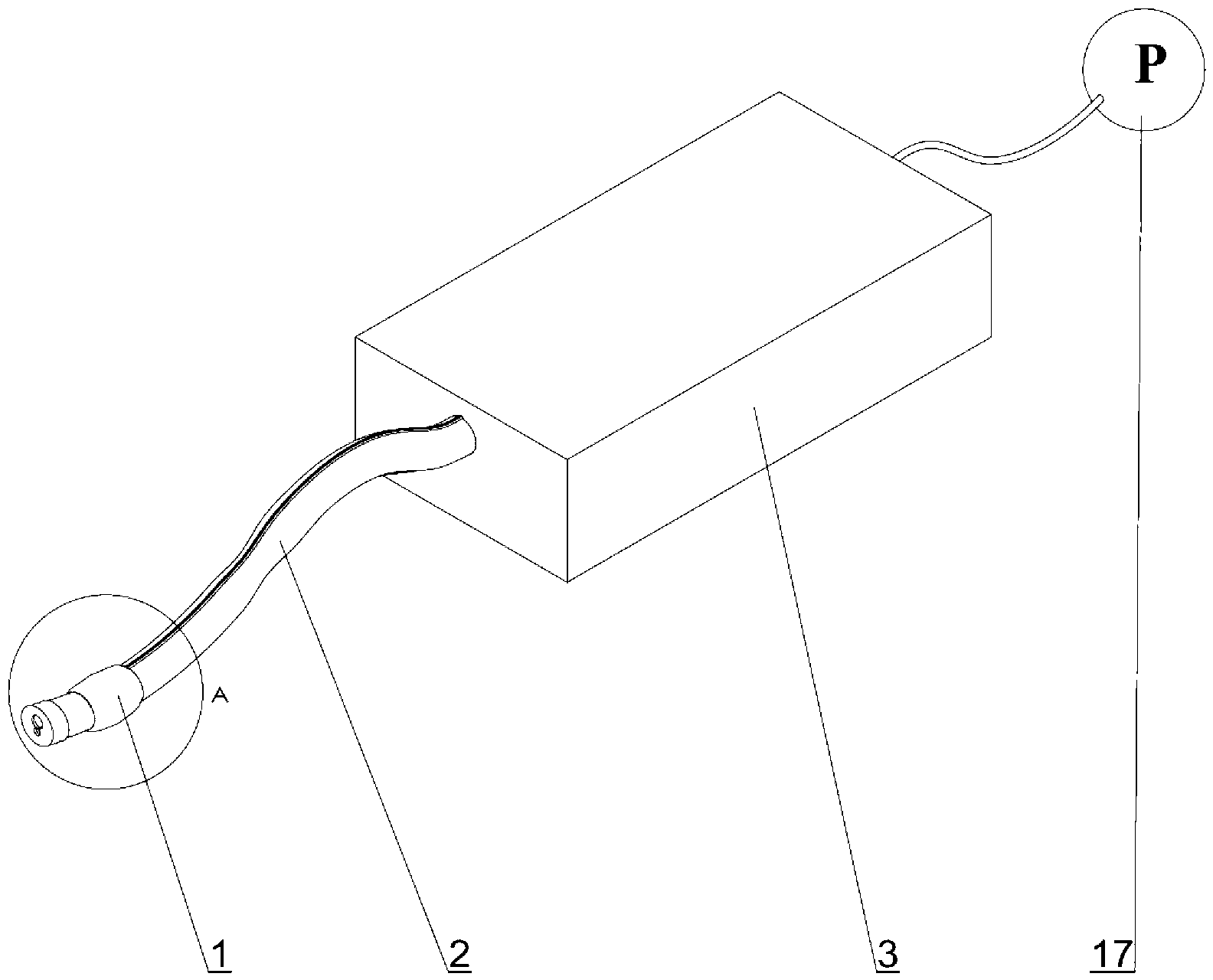
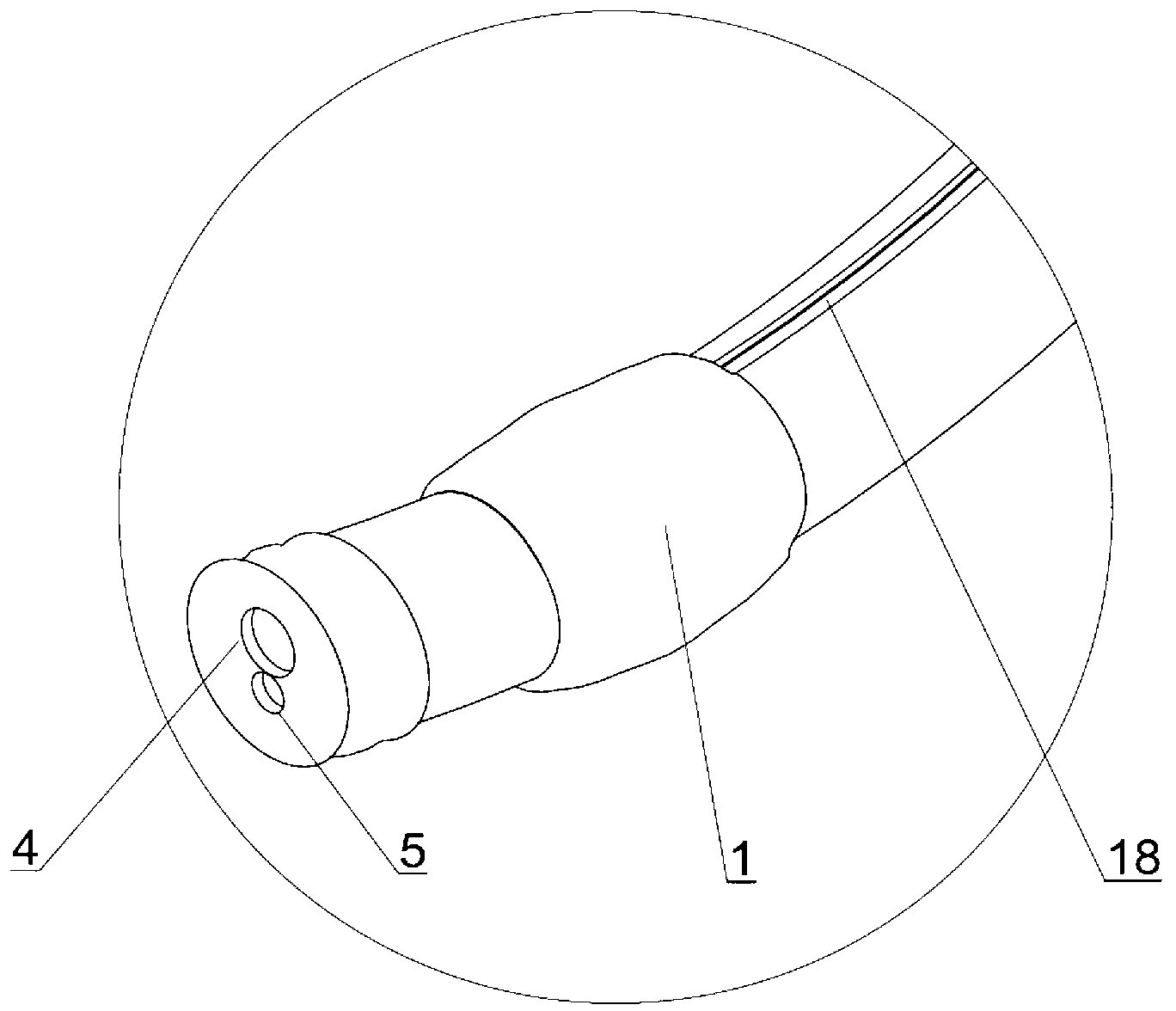
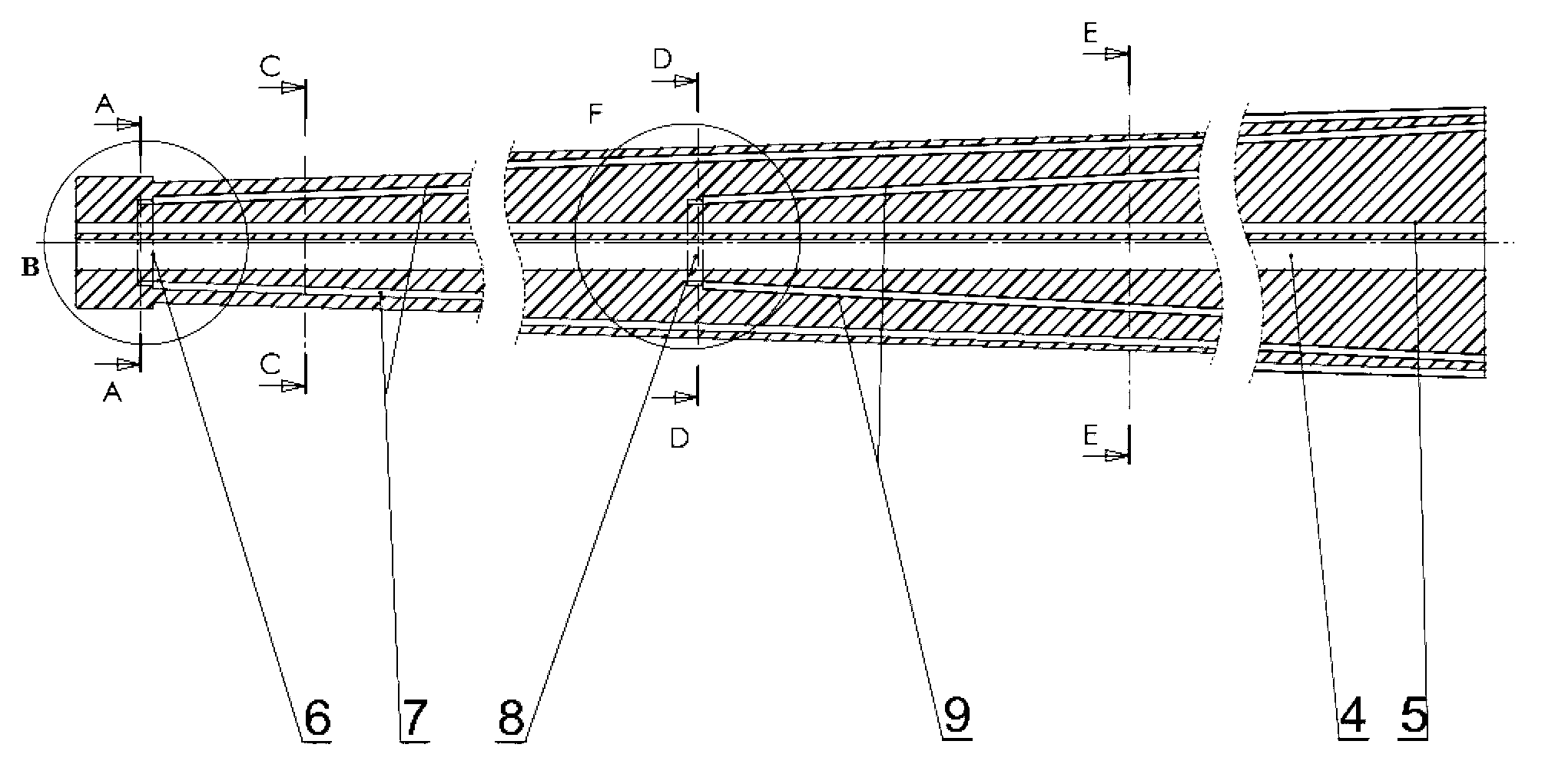
[0047] like figure 1 As shown, this embodiment includes: a catheter part 2, a driving part 3, a fluid supply part 17 and a balloon part 1, wherein one end of the catheter part 2 is connected to the driving part 3, and the balloon part 1 is arranged on the catheter part 2 free The end of the end, the fluid supply part 17 is connected with the balloon part through the fluid tube 18; the catheter part 2 is made of soft silica gel, and its interior is provided with a relatively firm embedded rope and a hard fixing joint, and the embedded rope The first end of the wire is connected to the rigid fixed section, The seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More