

Compressed sensing signal collection method based on filtering
A signal acquisition and compressive sensing technology, applied in the field of signal processing, can solve the problems that the signal reconstruction effect is not significantly improved, the size is not arbitrary, and affects the applicability, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and specific embodiment the technical scheme is further described as follows:
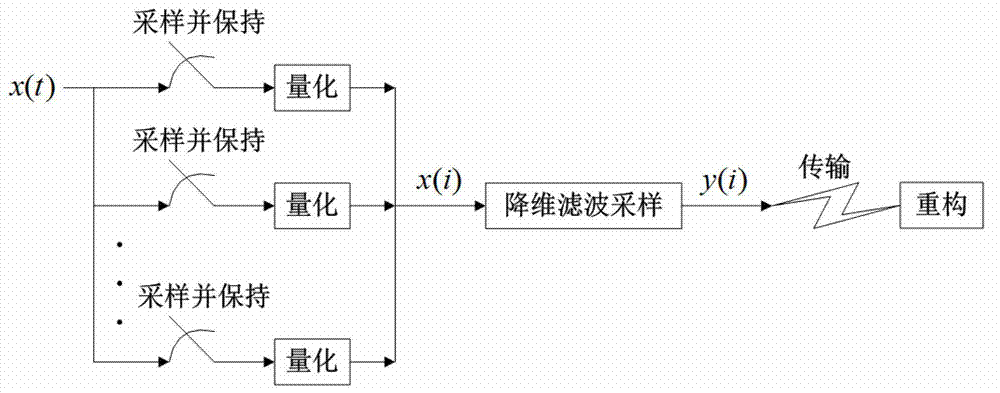
[0053] Filter-based Compressed Sensing Signal Acquisition Method
[0054] In order to obtain the observation of "compressing while sampling", the typical physical implementation method of CS is random downsampling [17] , Analog converter sampling [18] and random filter sampling [19] Wait. Literature [3] designed a dual-channel A / D random cooperative sampling based on the classical CS implementation principle, but the large storage capacity of the random number register and the large amount of calculation for dimensionality reduction random projection affect the sampling efficiency.
[0055] The present invention considers the signal x∈R N Difference Equations Through Finite Impulse Response Filters
[0056] y ( i ) = Σ k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More