

Non-cable self-control underwater navigation body hovering and controlling method
A technology of underwater vehicle and control method, applied in adaptive control, three-dimensional position/channel control, general control system and other directions, can solve problems such as inability to achieve hovering, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
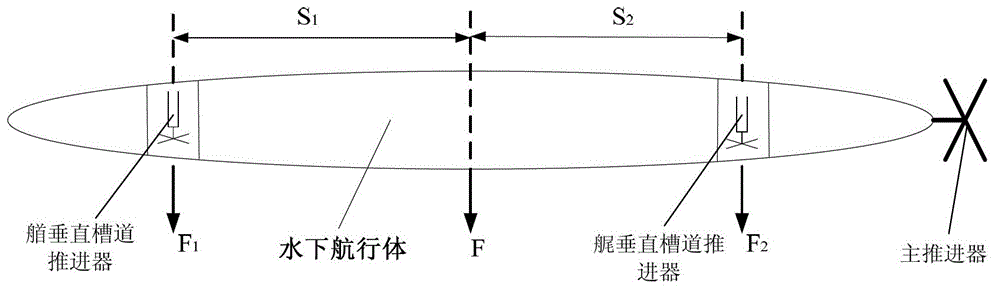
[0016] The bow and stern vertical slot thrusters are designed on the underwater vehicle. The bow and stern thrusters are exactly the same, and they are all composed of brushless DC motors and propellers. The power supply and speed of the brushless DC motors are controlled by the main control system. computer control.
[0017] A depth sensor and an electronic compass (including a pitch angle sensor) are installed on the underwater vehicle, and the main control computer collects the depth data of the depth sensor and the pitch angle data of the electronic compass through the serial port. The effect of controlling the depth data is also filtered by sorting the mean value.
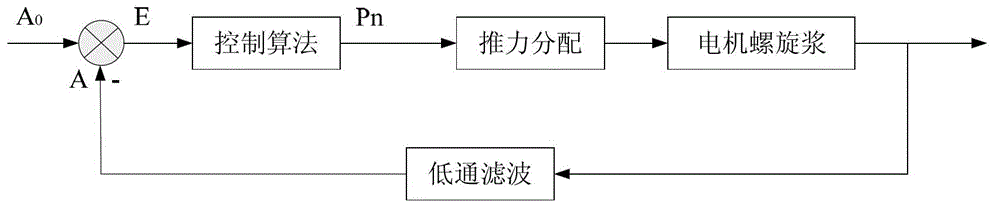
[0018] The main control computer uses the C language under the real-time multi-user operating system to realize the control of the depth and pitch angle of the underwater vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More