

Sea turtle four-fin flapping imitating type autonomous underwater robot
A technology for underwater robots and sea turtles, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems such as single thrust direction, low propeller efficiency, and poor maneuverability, and achieve good maneuverability, simple structure, and realization easy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
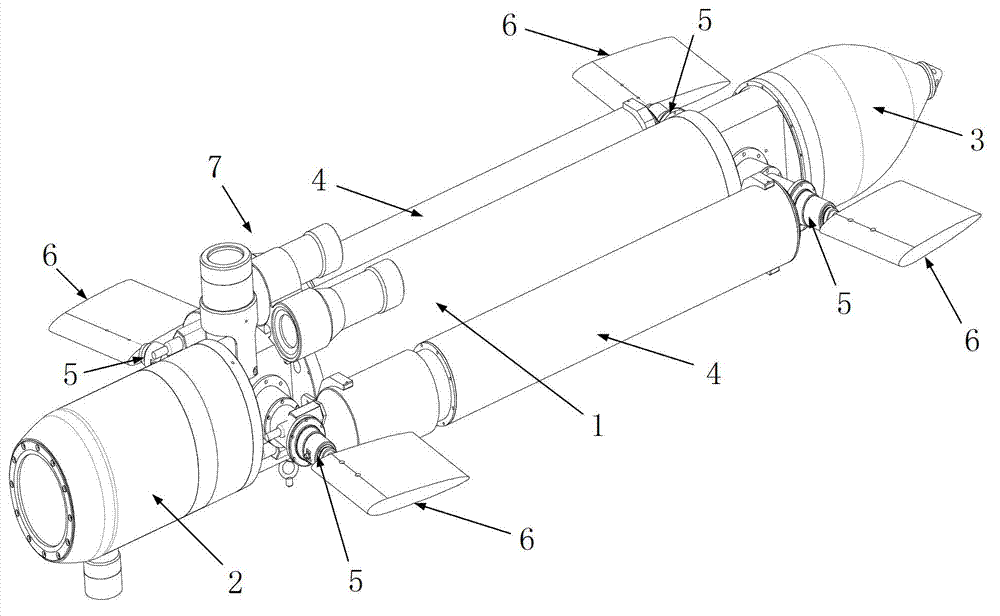
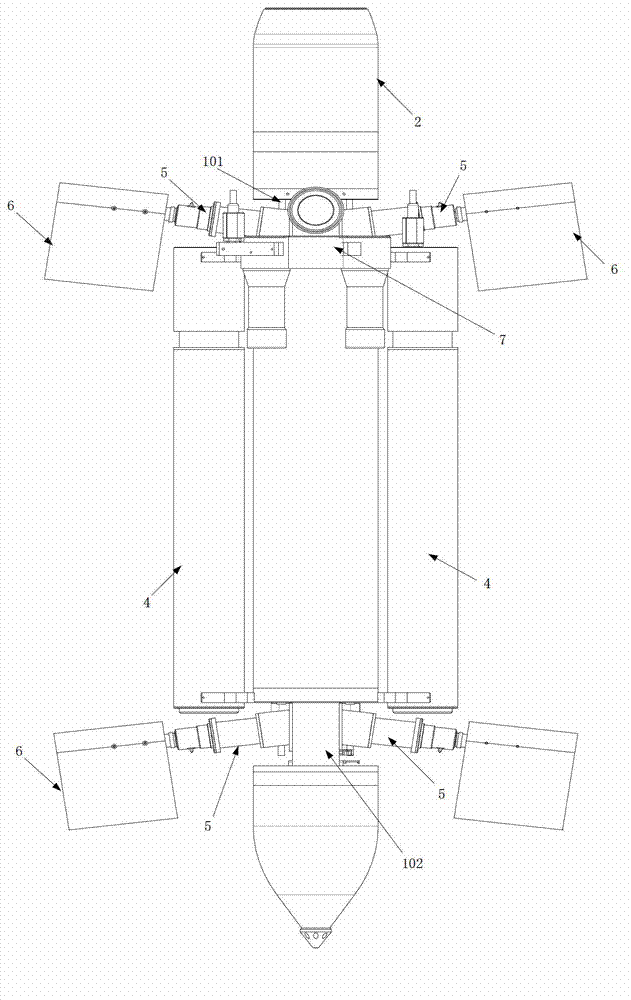
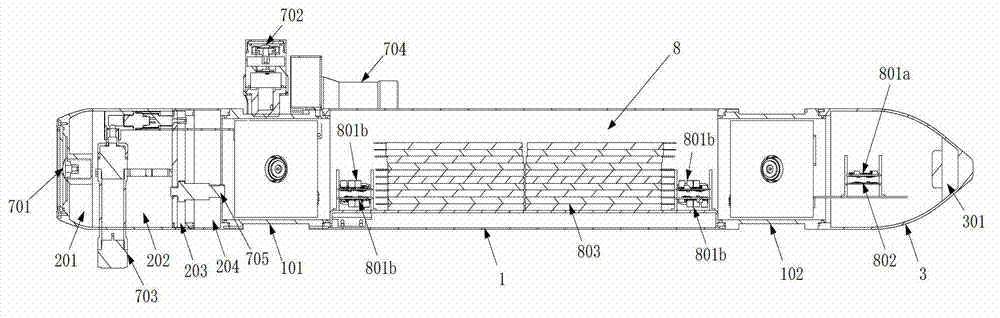
[0037] An autonomous underwater robot imitating sea turtle four-fin flapping, such as figure 1 , figure 2 , image 3 As shown, it includes a body 1 , a head 2 , a tail 3 , a counterweight mechanism 4 , flippers 5 , flapping fins 6 , sensing and mounting equipment 7 and a control system 8 . The body 1 is a cylindrical structure, the front end and the rear end are respectively sealed by the head connector 101 and the tail connector 102; the front end of the head connector 101 is connected with a mechanical head; The sensing and mounting device 7 includes a panoramic fisheye lens A701, a panoramic fisheye lens B702, an altimetry sonar 703, a light source 704 and a pressure sensor 705 for assisting the movement and detection of the underwater robot. The underwater robot is controlled and powered by the control system 8 , and the control system include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More