

Four-foot robot working space track generating method based on certified program generator (CPG) mechanism
A quadruped robot and work space technology, applied in instruments, two-dimensional position/channel control, adaptive control, etc., can solve problems such as the inability to exhaust various robot modes, and the inability to solve the problem of adaptive walking in the robot environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
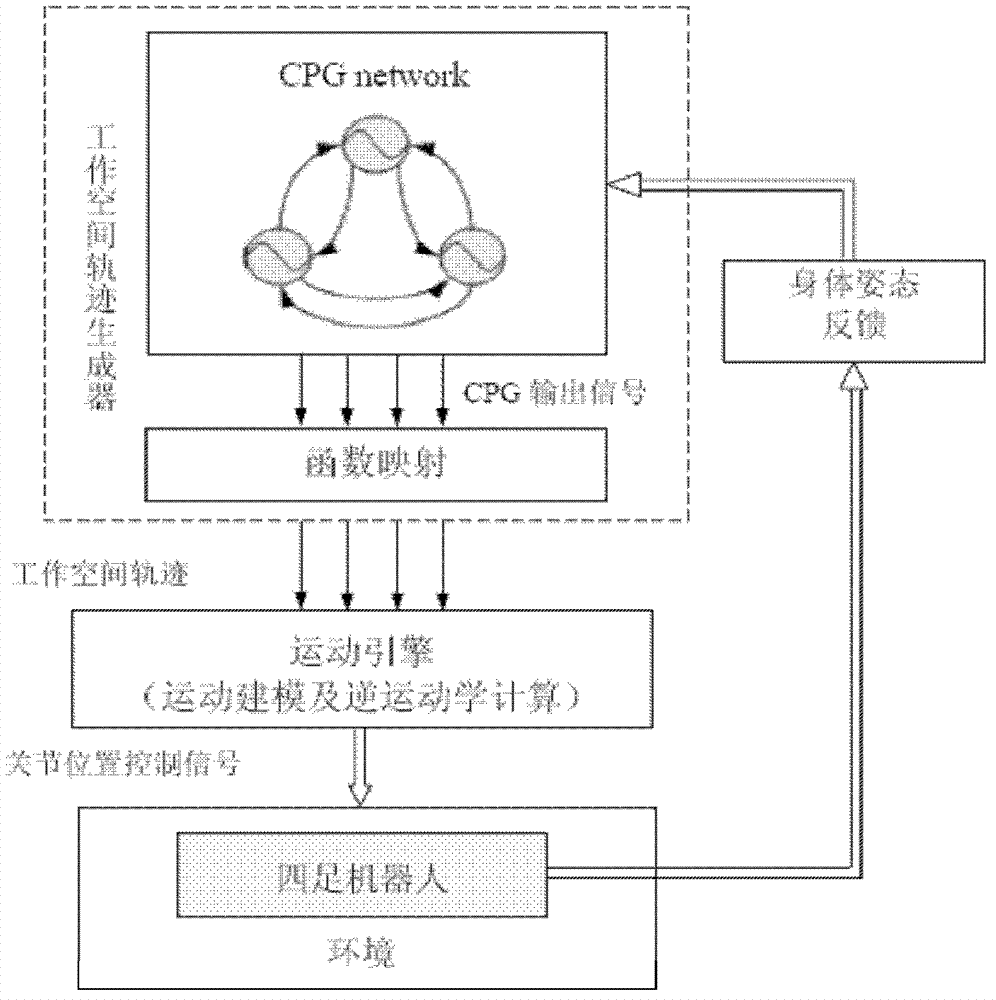
[0034] The invention changes the traditional control idea, considers the use of bio-stimulation control mechanism from the end trajectory of the robot, proposes a new method of robot walking control based on CPG, and applies it to AIBO, a special robot for the Robocup standard platform group competition. This method is based on the CPG network, and the robot workspace trajectory with certain adaptability is generated online through the mapping function, and the joint control signal with certain environment adaptability can be obtained through the motion engine mapping from the workspace to the joint space of the robot, thus realizing the robot Adaptive walking to the environment.
[0035] The steps of the present invention to generate the control signal of environmental adaptive walking on-line are as follows:
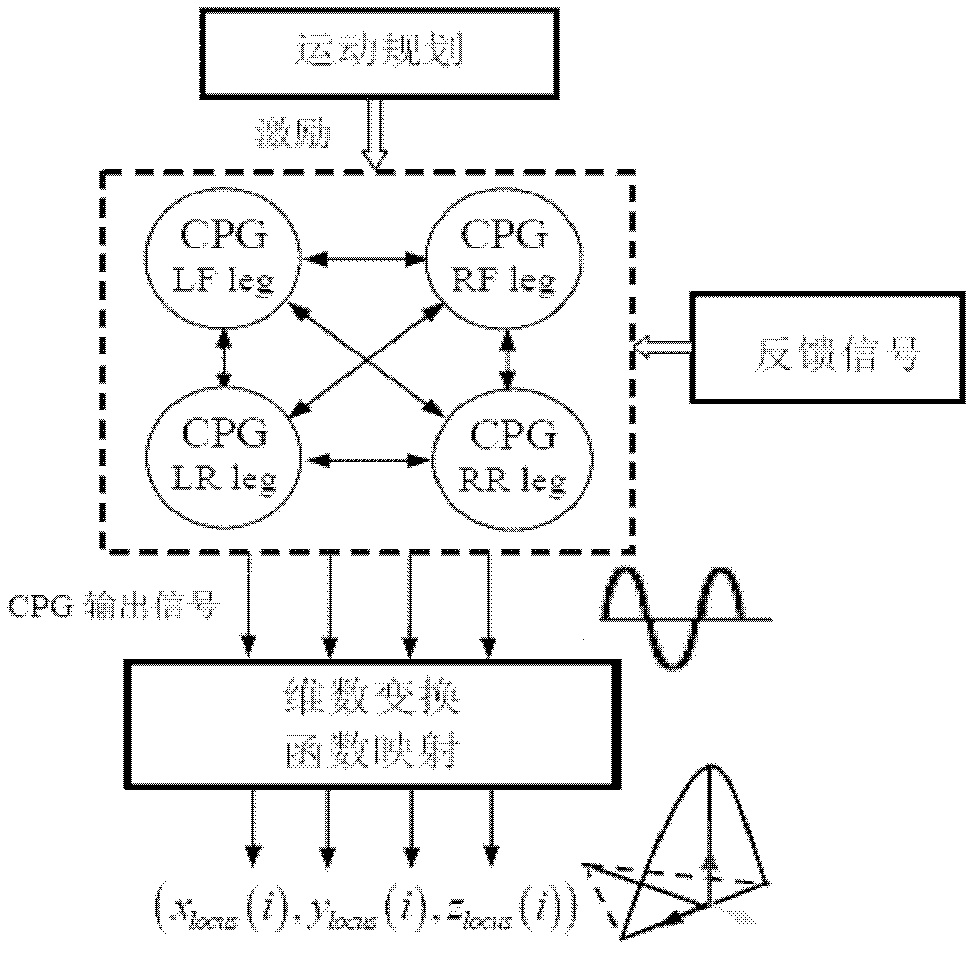
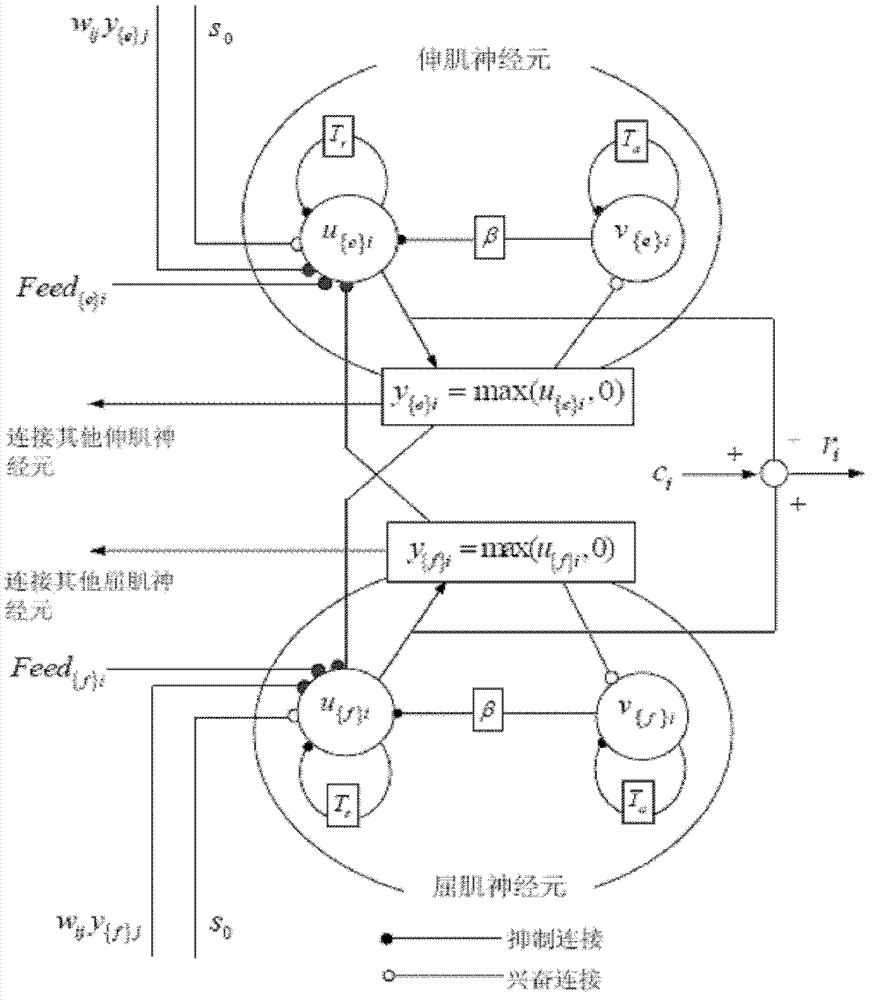
[0036] First, the CPG network corresponding to the four feet of the robot is designed, and the influence of network parameters on the amplitude, frequency and phase of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More