

Operating object position and posture recognition method applicable to industrial robot
An industrial robot and recognition method technology, applied in the field of industrial robots, can solve problems such as the inability to realize real-time control of the robot system, the inability to obtain depth information, and the high complexity of the binocular algorithm, so as to improve the accuracy of servo control, ensure real-time performance, and eliminate errors. The effect of tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
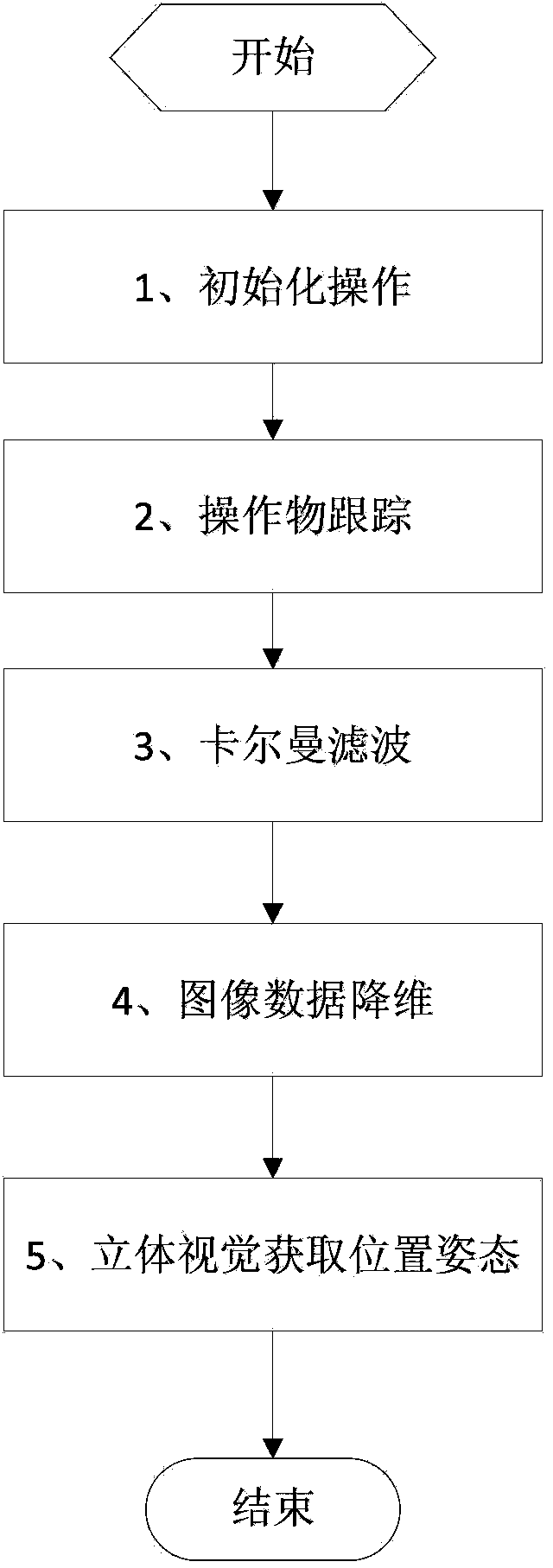
[0054] refer to figure 1 , an operator position and posture recognition method suitable for industrial robots, which includes five steps: initialization operation, operator tracking, Kalman filtering, image data dimensionality reduction, and stereo vision acquisition of position and posture.
[0055] Step 1: Initialize the operation
[0056] The initialization operation mainly includes: image data acquisition, binocular camera calibration, and initial position calibration of the operator.
[0057] The image data collection is to collect the images of the left and right cameras respectively in real time. In order to ensure the real-time performance of the method, the collection frequency should be greater than 8 frames per second.
[0058] The calibration of the binocular camera includes the calibration of the internal parameters of the left and right ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More