

Flexible body of bionic robot
A bionic robot and flexible technology, applied in the field of bionic robots, can solve problems such as poor flexibility and poor bionic effect, and achieve the effect of simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
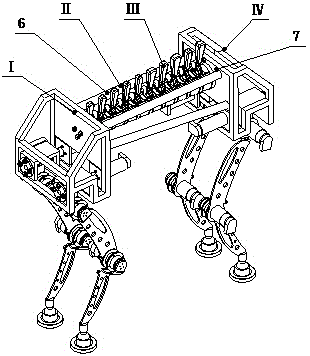
[0017] Such as figure 1 As shown, a flexible body of a bionic robot is composed of a front body (I), a rear body (IV), an artificial spine (III), and a pneumatic artificial muscle (II). It is characterized in that: the front body (I) 1. The rear body (Ⅳ) is a space frame structure, and the two are connected as a whole by 1 artificial spine (or vertebra) (Ⅲ) and 4 pneumatic artificial muscles (Ⅱ).
Embodiment 2
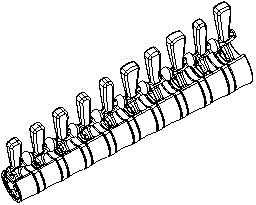
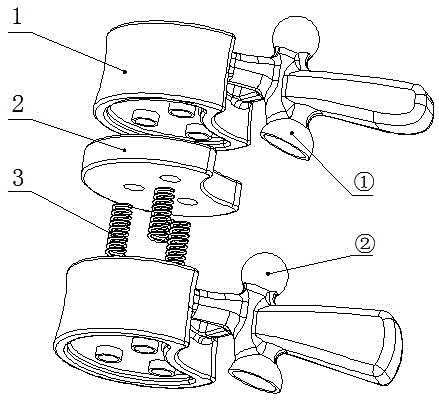
[0019] see figure 2 with image 3 , this embodiment is basically the same as Embodiment 1, and the special feature is: the artificial spine (or vertebra) (III) is composed of 10 identical bionic spine units arranged in order from small to large. Each bionic spine unit includes a bionic vertebra (1), a bionic intervertebral disc cushion (2) and three springs (3), which are arranged alternately in space. The former bionic vertebra (1) has a lower articular surface (①) and the upper articular process (②) of the latter bionic vertebra forms a spherical pair. Two adjacent intervertebral pads are provided with a bionic intervertebral disc cushion (2), and three springs (3) run through the bionic intervertebral disc cushion (2). In this way, two adjacent bionic vertebrae (1) can swing up and down and left and right within a certain range around the ball pair formed by the lower articular surface of the previous vertebrae (①) and the upper facet process of the latter vertebrae (②)....
Embodiment 3
[0021] see Figure 4 , this embodiment is basically the same as Embodiment 1, the special feature is: the gas artificial muscle (II) is composed of an airtight elastic tube (4) and a braided sheath (5) covering it. The braided sleeve (5) has a 30-degree angle between the braided fiber and the axis o ~60 o Angle, which is the weaving angle. When a certain pressure of gas is injected into the gas artificial muscle (II), the airtight elastic tube deforms under the action of internal pressure, which drives the braided sleeve to move radially together, the braided angle increases, and the braided sleeve axially shortens to realize muscle shrinkage effect. On the contrary, the gas is discharged to achieve the effect of artificial muscle relaxation.
[0022] The working principle of the flexible body of the bionic robot described in the present invention is explained as follows in conjunction with the accompanying drawings: To make the body bend sideways, discharge gas from the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More