

Vision positioning method in dynamic environment
A visual positioning and dynamic scene technology, applied in image data processing, instruments, calculations, etc., can solve the problems of reduced positioning accuracy, positioning errors, and mismatching feature points, so as to reduce errors, increase matching stability, and improve real-time Effects of Sexuality and Effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
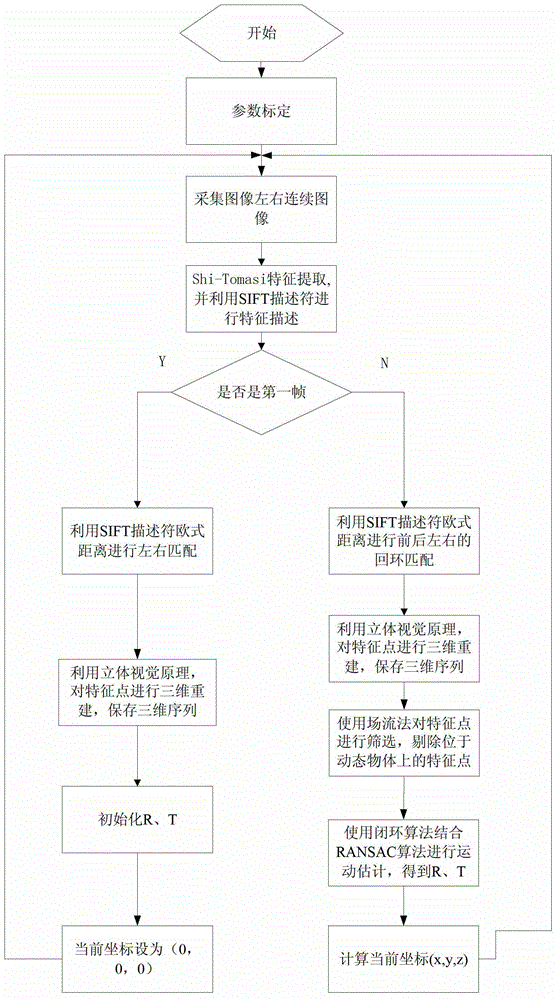
[0030] Below in conjunction with accompanying drawing, the method of the present invention is described in detail:
[0031] Step 1: Calibrate the binocular camera and obtain the internal and external parameters of the camera, including: focal length f, baseline length b, image center pixel position u 0 , v 0 , the correction matrix of the entire image, etc.
[0032] Step 2: Turn on the binocular camera, collect left and right images continuously, and use the camera parameters obtained in step 1 to correct the image.
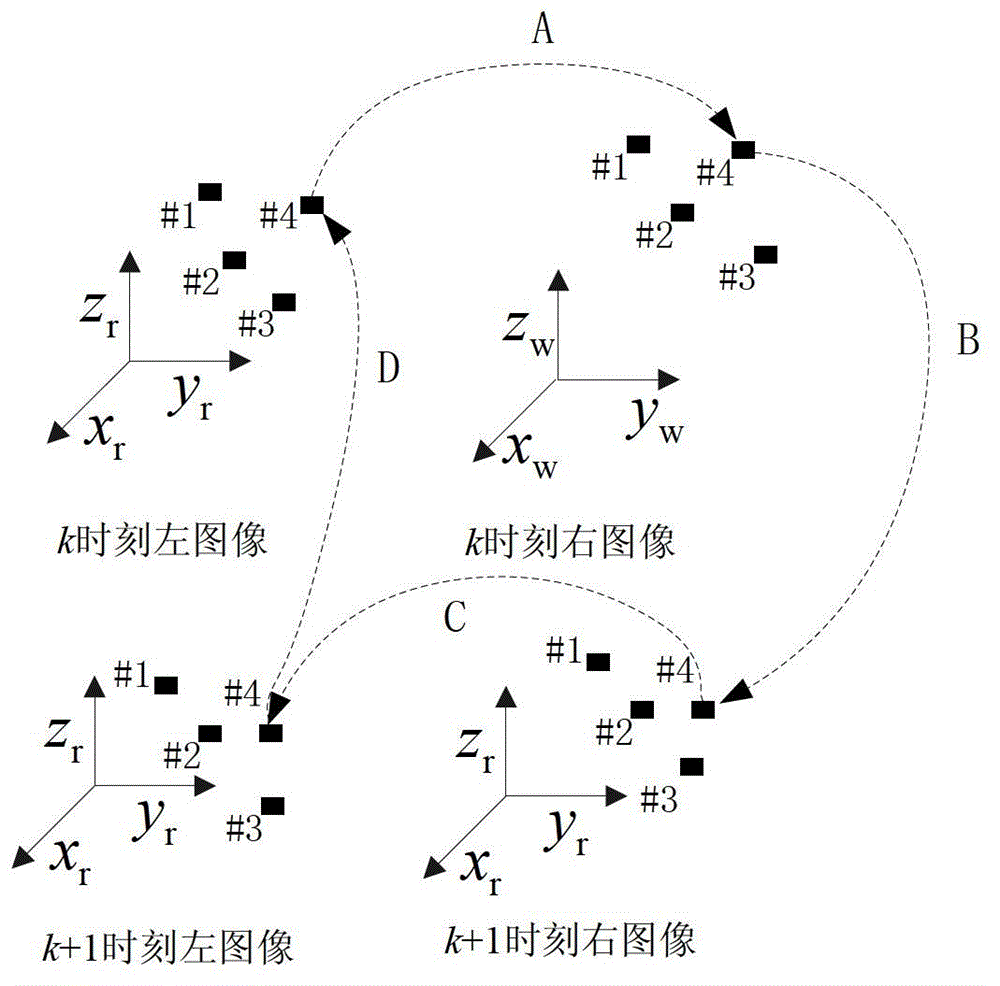
[0033] Step 3: If the image is the first frame, use the sobel operator to extract features from the collected left and right images, and use the SIFT descriptor to describe, and perform special positive matching between the left and right images to obtain the corresponding relationship of feature points. If the image is not the first frame, a total of four images at two moments before and after are matched for feature matching, and the accuracy of the matching ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More