

Line feature map creation method of mobile robot based on laser range finder
A technology of laser range finder and mobile robot, which is applied in the directions of maps/plans/charts, instruments, image enhancement, etc. It can solve the problems of complex calculation, large amount of calculation in Hough space, and many restrictions, so as to achieve simple calculation and reduce calculation The effect of high quantity and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Such as Figure 5As shown, the present invention is about a method for creating a line feature map of a mobile robot based on a laser range finder, which specifically includes the following steps:
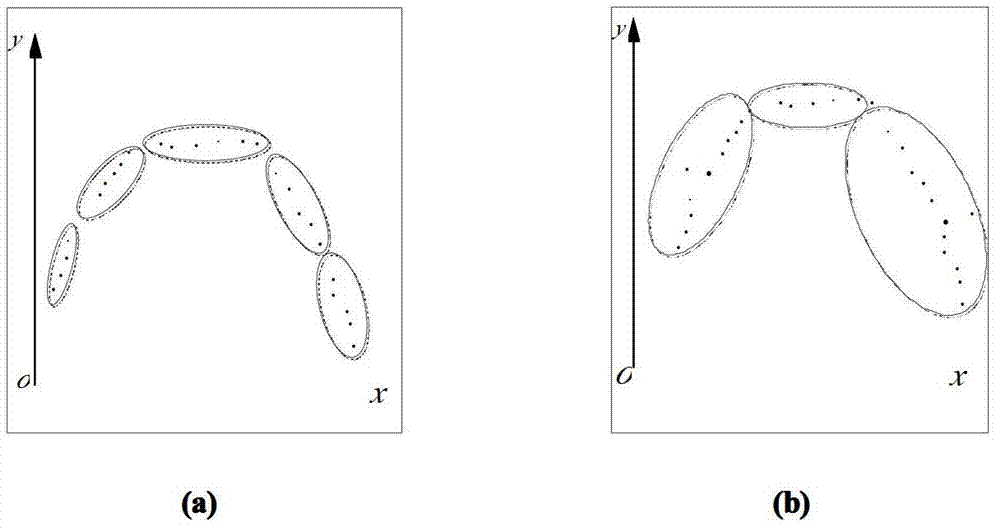
[0034] When the laser range finder scans the 180-degree range in front, due to the limitation of the range of the laser range finder and the influence of external noise, there are noise points in the creation of the local map. Firstly, mean filtering is performed on the noise points in the measurement data of the laser rangefinder, and after the purpose of filtering the noise is achieved, the data points of the laser scanning are segmented. Specifically include the following steps:
[0035] Step 1: initialize the mobile robot, start the laser rangefinder to scan the external environment;
[0036] Step 2: by scanning the laser data, find the distance between the adjacent data points and select the noise points therein;
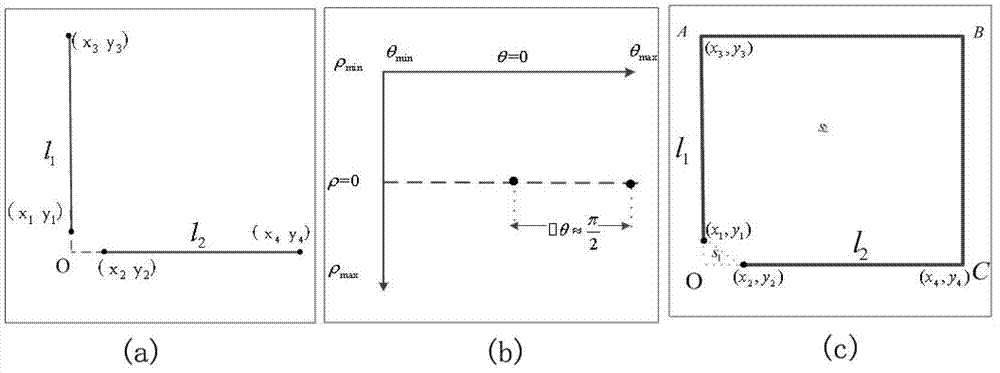
[0037] Step 3: According to the two points closest t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More