

Exoskeleton robot controlling system and method
An exoskeleton robot and control system technology, applied in the field of control systems, can solve problems such as insufficient stability and reliability, control system logic confusion, and control system collapse, and achieve a simple and clear structure, reduced coupling, and clear layers Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and examples.
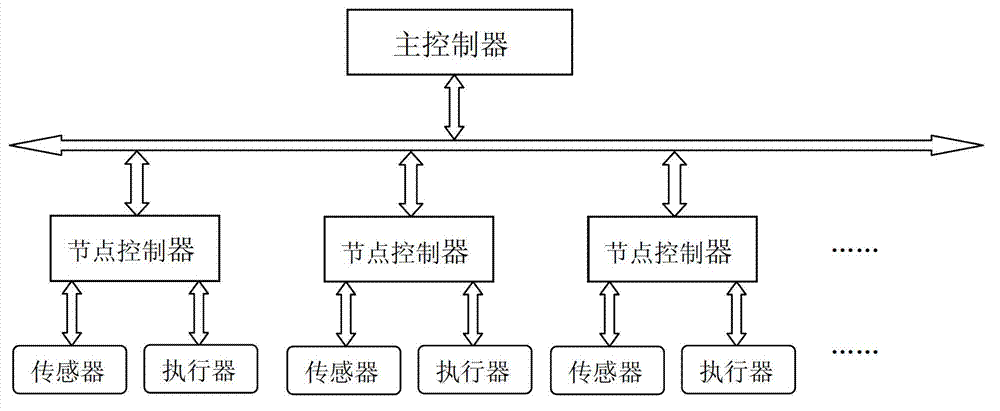
[0031] figure 1 The structure of an exoskeleton robot control system according to the present invention is shown, and the exoskeleton robot control system is applicable to motor-driven, hydraulic-driven or pneumatic-driven exoskeleton robots. The exoskeleton robot control system includes a main controller and at least one node unit, each node unit includes a node controller and sensors and actuators respectively connected to the node controller, and the node controllers are respectively connected to the main controller. The main controller is mainly used to summarize, process and calculate the information of all node units of the exoskeleton to obtain the joint control information of the exoskeleton robot, and then send joint control commands to the corresponding node controllers. The main controller and the node contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More