

Press-robot synchronous movement coordination method
A technology of synchronous movement and coordination method, applied in the field of automation, can solve the problems affecting the production beat of the whole line and long cycle period, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
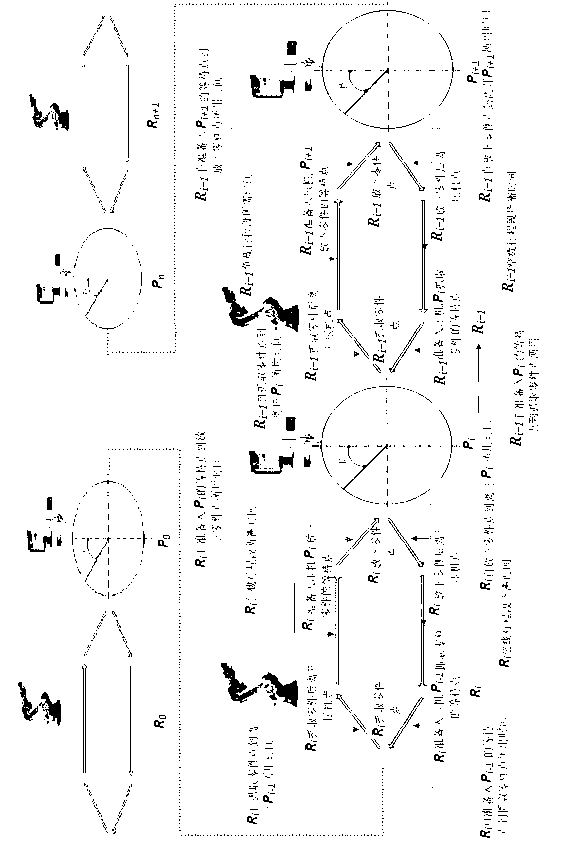
[0037] The present invention will be further described below in conjunction with the accompanying drawings. figure 1 The principle of the basic logic flow diagram for press-robot synchronization is explained: in the current robotic stamping automation line, the speed of the press usually does not change, the press is too slow to keep up with the speed of the robot, and the flexibility of the robot's movement speed adjustment Very large, so the press line uses synchronous motion control technology to adjust the robot speed to reduce the waiting time.
[0038] In a press cell, with robot R i Arrive at press P i The moment when the part is put down is taken as the starting point, and the press P is calculated i start moment. Robot R i Run until the parts are put down and leave the press, press P i start; calculate P i Run to beta angle clock time T (i.e. allow R i+1 Enter the press P i moment); the simultaneous computation allows the robot R i Ready again for press P i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More