

Dual-drive bionic pectoral fin framework
A double-drive, pectoral fin technology, applied in the field of flexible pectoral fin skeleton and double-drive bionic pectoral fin skeleton, can solve the problems of complex pectoral fin structure and inability to achieve motion effects, and achieve the effects of simple control, reduced number of driving sources, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
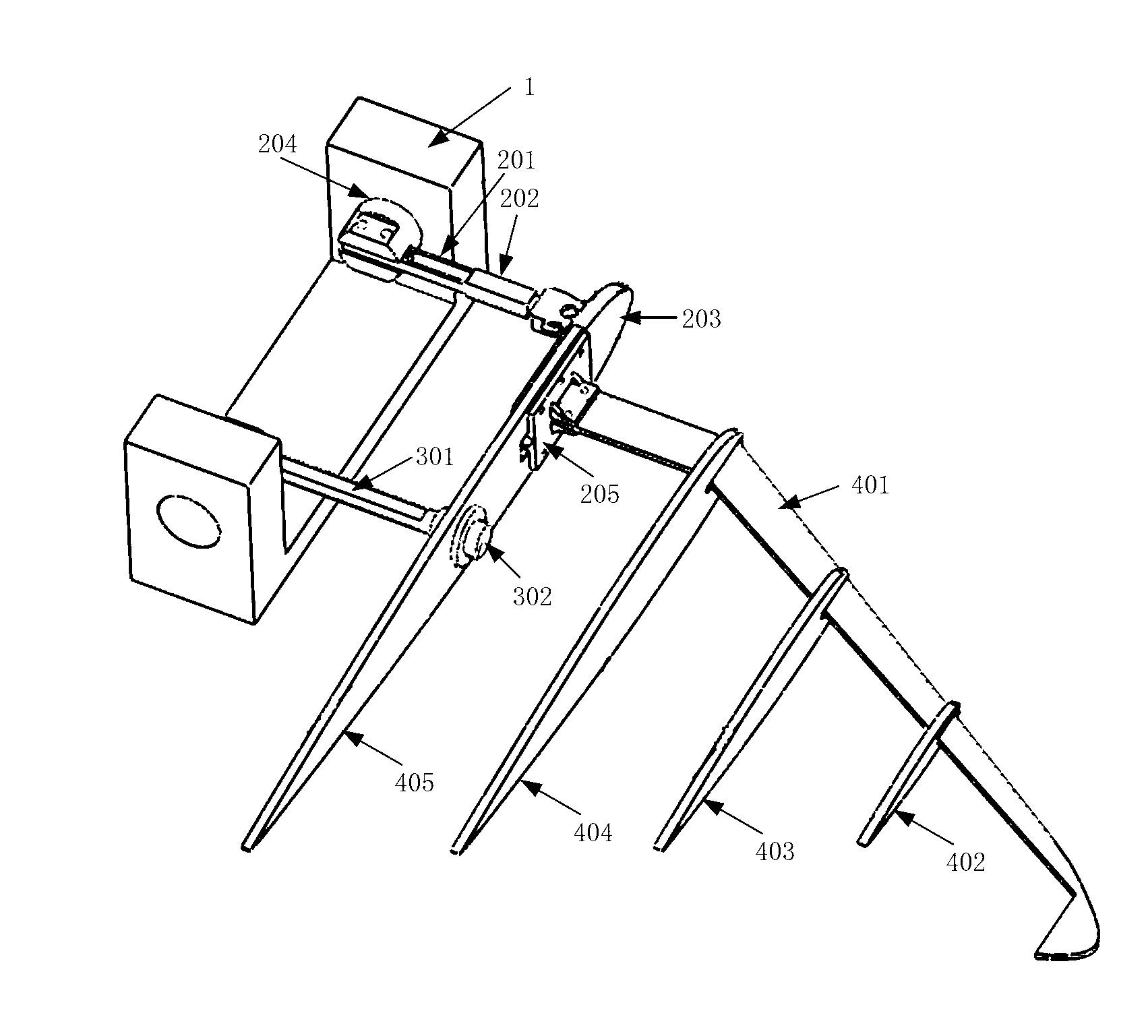
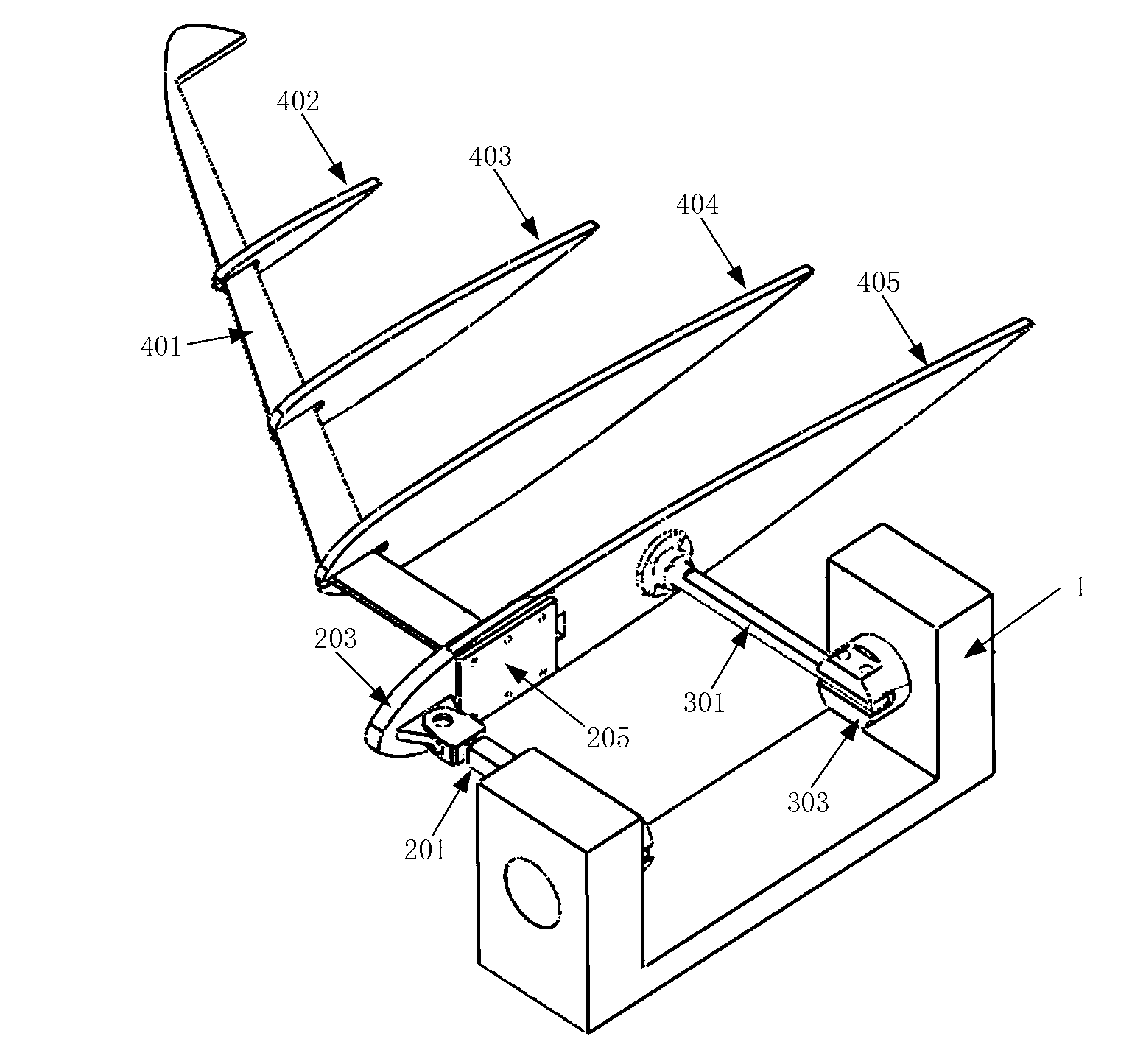
[0025] The present invention is a double-drive bionic pectoral fin skeleton, such as figure 1 , figure 2 As shown, it includes a frame 1, a first kinematic joint 2, a second kinematic joint 3, and a pectoral fin swing plate 4;
[0026] The first kinematic joint 2 includes a front swing bar 201, a front slide bar 202, a front drive shaft 204, and a skeleton connection block 205;
[0027] The second kinematic joint 3 includes a rear swing rod 301, a bearing seat 302, and a rear drive shaft 303;
[0028] The pectoral-like swing plate 4 includes a span-wise rib 401, a first chord-wise rib 402, a second chord-wise rib 403, a third chord-wise rib 404 and a swing plate 405;
[0029] Frame 1 has no fixed shape, but serves as an imaginary carrier for the dual-drive bionic pectoral fin skeleton, and it is necessary to connect the DC servo motor and drive sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More