

Photoelectricity-navigation-based unmanned road recognition system
A road recognition and unmanned driving technology, applied in character and pattern recognition, two-dimensional position/channel control, instruments, etc., can solve the problems of cumbersome system implementation process, high infrastructure requirements, difficult maintenance, etc., and achieve convenient real-time Observation, low cost, the effect of optimizing the speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
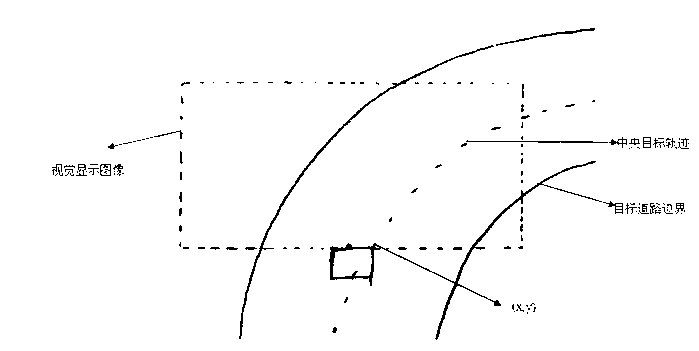
[0038] Below in conjunction with the accompanying drawings, and the specific embodiment when the road boundary is recognized as a green belt by the unmanned vehicle of photoelectric navigation, and the preset color block marker is a turning sign (that is, the speed control module immediately reduces the speed to the set value) value, and get back to the straight road driving state through the corner smoothly) and the present invention will be further described in detail.
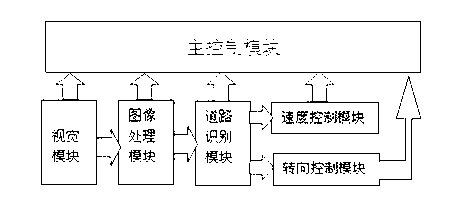
[0039] figure 1 It is a schematic diagram of the system structure of the photoelectric navigation-based driverless road recognition system according to the present invention. The system consists of main control module, vision module, image processing module, road recognition module, speed control module and steering control module. The vision module collects images in real time and transmits them to the image processing module. The image processing module extracts the road boundary and transmits it to the r...
Embodiment 2
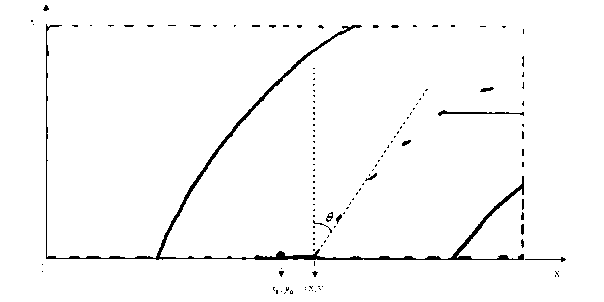
[0044] How to realize the central target trajectory of rapid tracking simulation under the condition of high speed and large changes in road curvature, on the one hand, depends on the main control module using STM32 processing of μC / OS embedded system and high-performance ARM Cortex-M3 core, on the other hand On the one hand, it depends on the improved multivariate PID algorithm adopted by the steering control module, so that the car can adjust the direction of the steering gear in real time and drive smoothly on the simulated road target trajectory. The algorithm is as follows:
[0045] u = k p e + k i ∫ edt + k d de dt + kθ ;
[0046] Among them, u is the controller output, k p 、k i 、k d and k are proportional coefficient, integr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More