

Novel acceleration layer repetitive motion planning method for redundant manipulator
A repetitive motion and acceleration technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of physical damage to the mechanical arm, failure to meet the requirements for parameter selection of the repetitive motion scheme of the acceleration layer, and a single scheme, and achieve broad prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings.
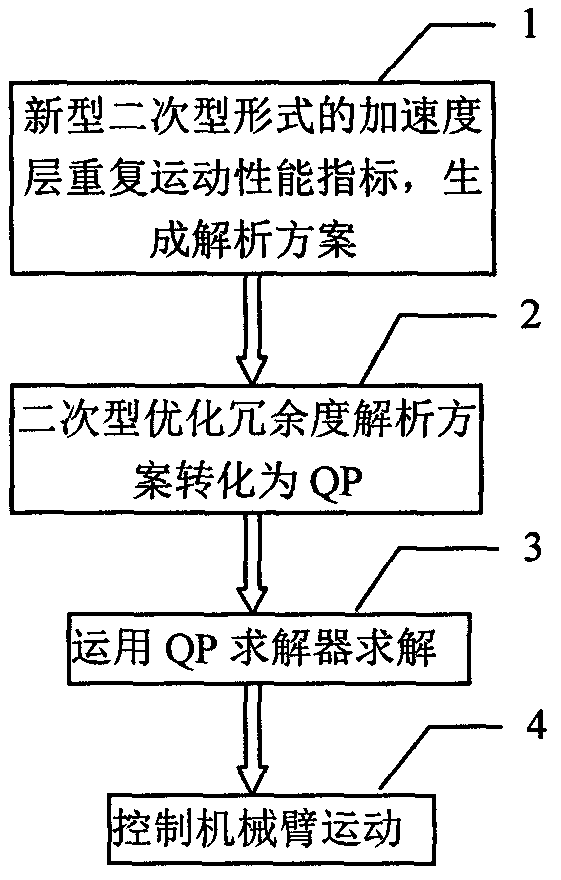
[0022] figure 1 The new redundant manipulator repetitive motion planning method shown above first proposes the repetitive motion performance index and constraints of the acceleration layer; then converts it into the corresponding QP; then applies the QP solver to solve it: finally, the lower computer controller controls the mechanical arm according to the solution result arm movement.
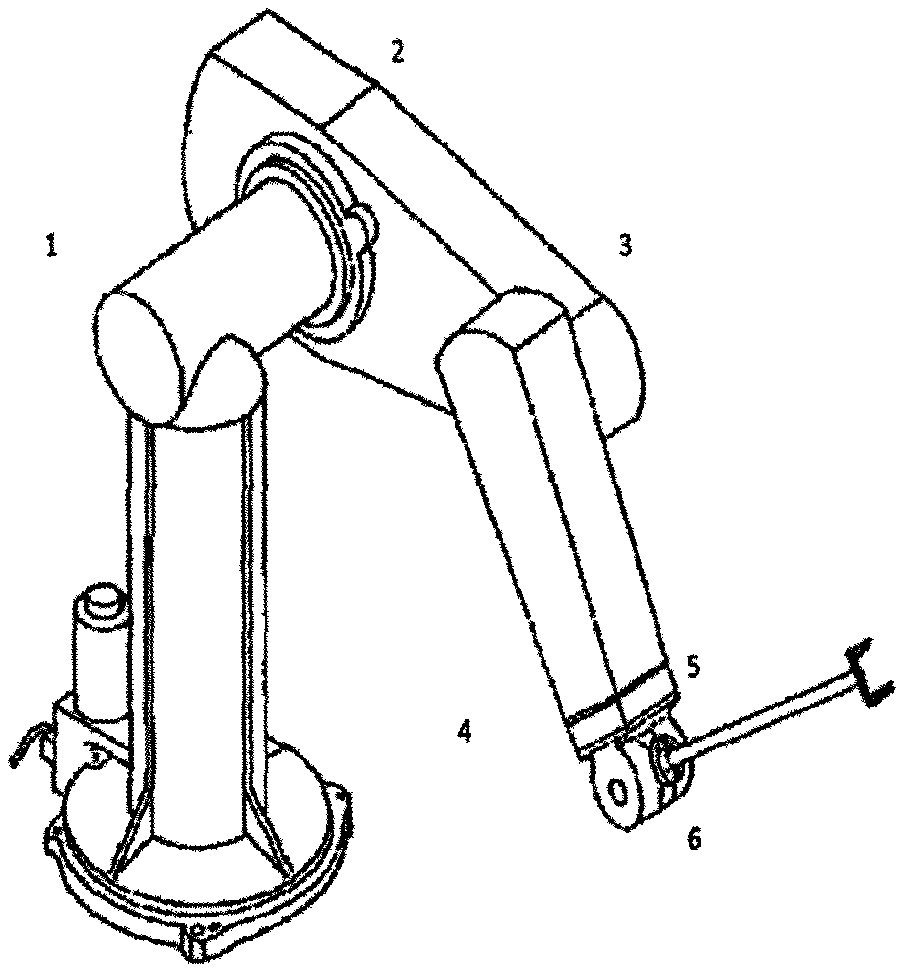
[0023] figure 2 The shown mechanical arm for realizing the present invention is a PUMA560 mechanical arm with six degrees of freedom in space. The robotic arm consists of six linkages through joint 1, joint 2, joint 3, joint 4, joint 5 and joint 6.
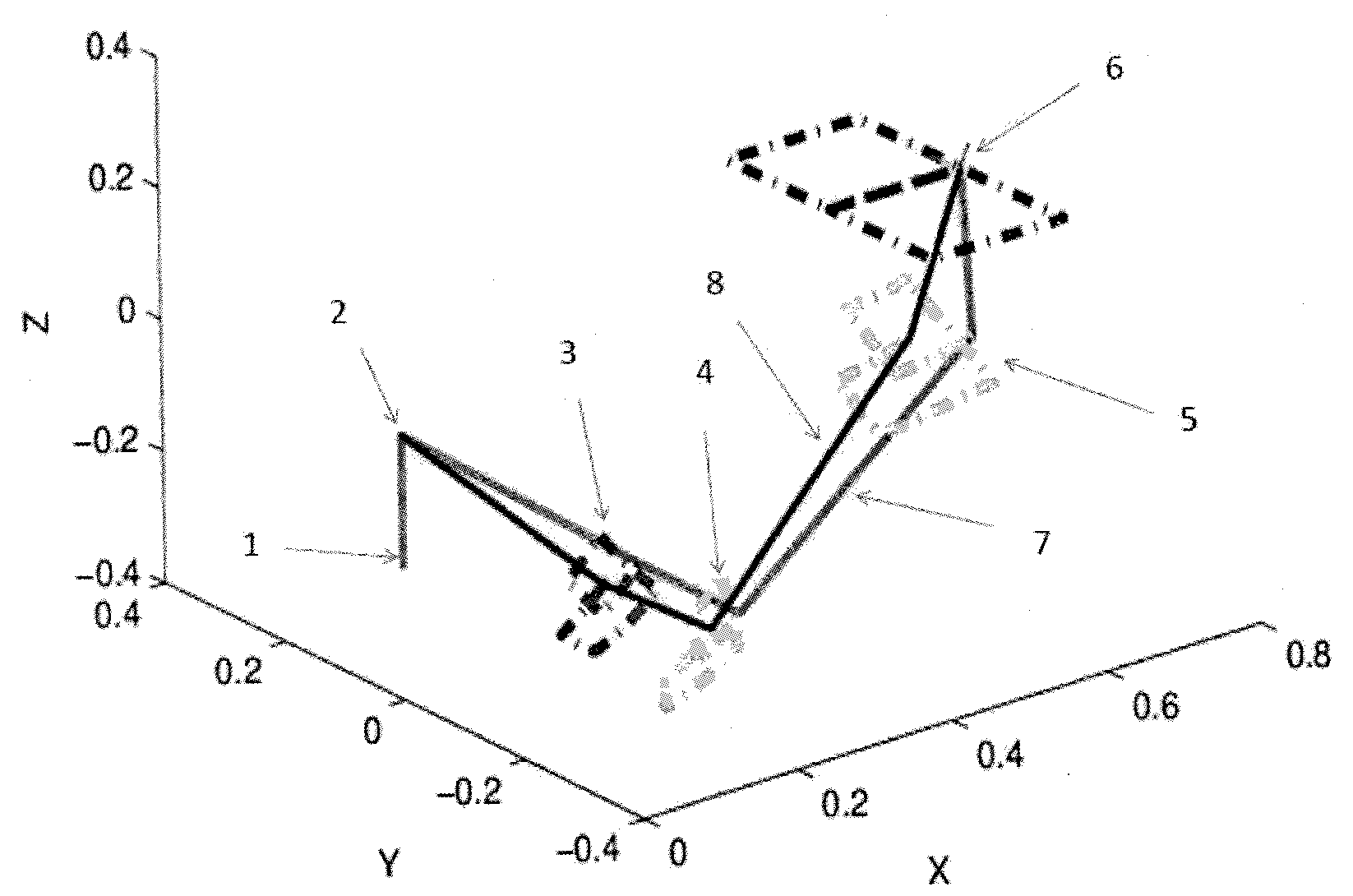
[0024] image 3 Schematic of the non-repetitive motion of the PUMA560 robotic arm shown. Given that the end task is a Chinese character "day", the PUMA560 robotic arm starts to execute from the initial position 7. After completing the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More