

Maneuvering unloading pitch axis angular momentum method by satellite pitching axis attitude
A technology of attitude maneuvering and pitching axis, which is applied in the direction of aerospace vehicle guidance devices, etc., and can solve the problem of expensive unloading devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
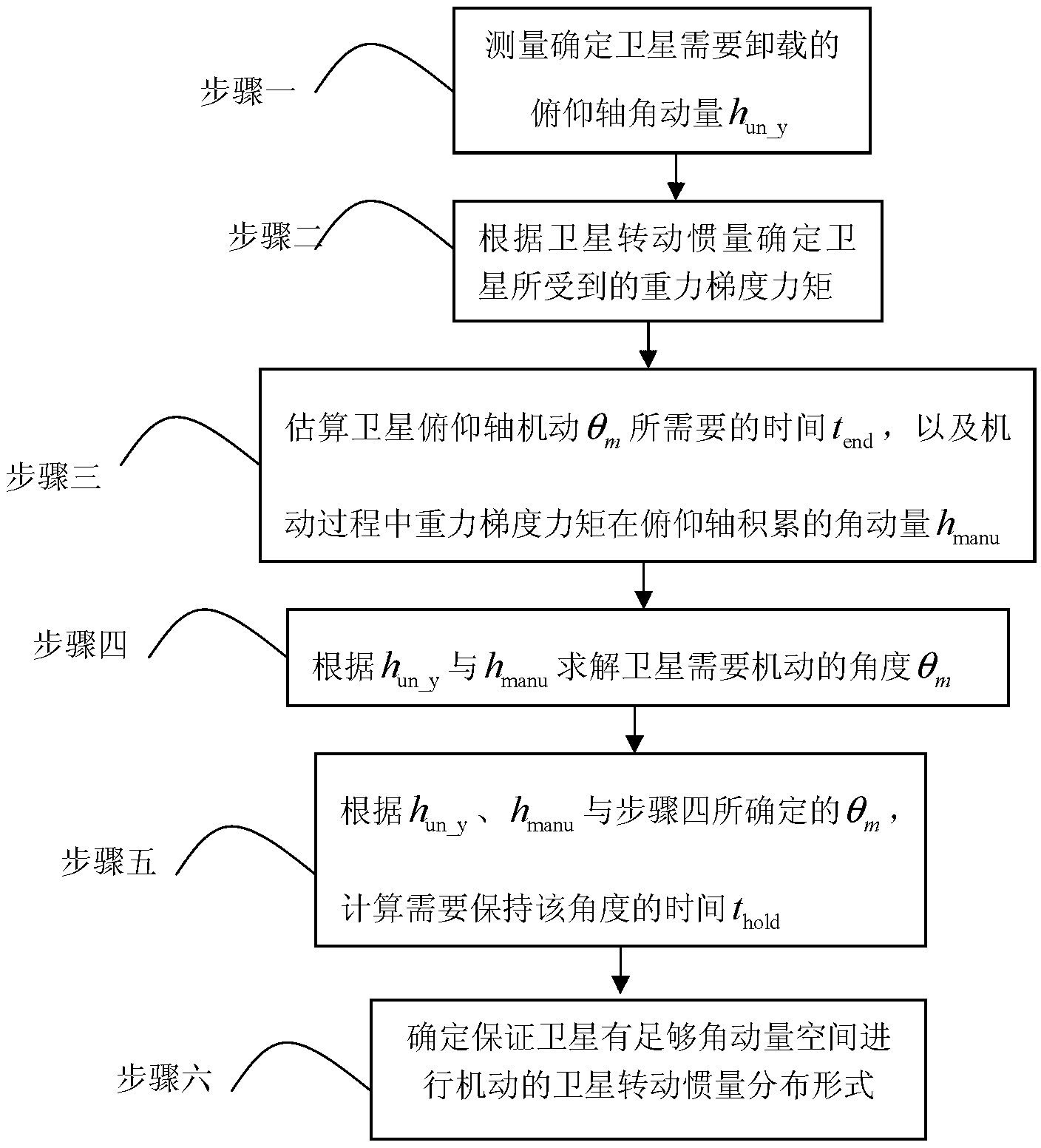
[0042] Specific implementation mode one: combine Figure 1 to Figure 5 Description of this embodiment: a method for unloading angular momentum of the pitch axis using satellite pitch axis attitude maneuvering, the specific process is as follows:
[0043] Step 1. Measure and determine the angular momentum h of the pitch axis that the satellite needs to unload un_y , the specific steps are:
[0044] Measure the angular momentum component of each momentum exchange actuator in the body coordinate system, and express the angular momentum component of the ith momentum exchange actuator in the body coordinate system as From this, the component h of the total angular momentum of all momentum exchange actuators on the pitch axis can be obtained un_y , the expression is:
[0045] h un _ y = - Σ i = 1 ...
specific Embodiment approach 2
[0078] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in step 3, the time t required for satellite maneuvering is solved end The specific process is:
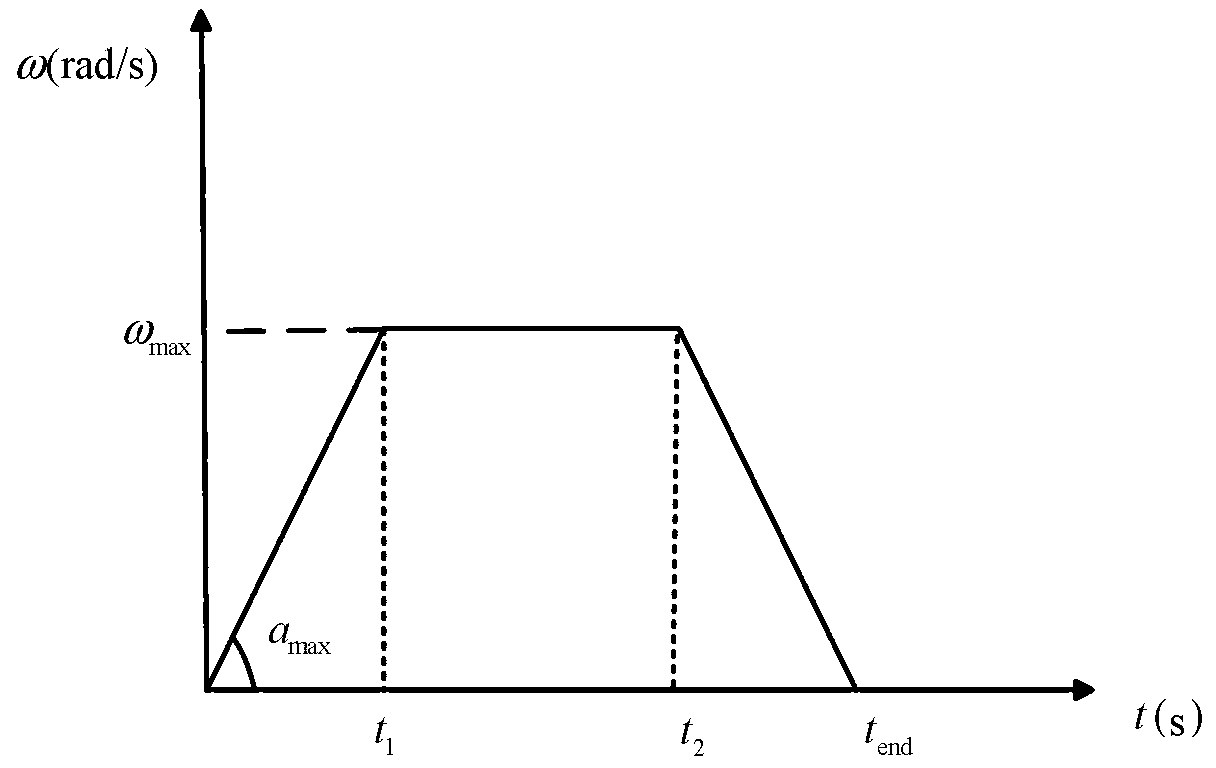
[0079] Step 31: The form of satellite maneuvering is: start to accelerate with the maximum torque, when the satellite speed reaches ω ymax After that, stop exerting torque on the satellite, let the satellite take ω ymax Roll at a constant speed at the angular velocity, and finally decelerate the maximum moment in the time direction of the satellite to ensure that the satellite's attitude angle reaches the specified value, and the attitude angular velocity is 0;
[0080] Step 32: According to the maneuvering form of the satellite, the maximum maneuvering angular velocity ω ymax and the satellite's maximum angular acceleration a ymax , it can be estimated that the time spent by the satellite acceleration segment and the acceleration segment is
[0081] t 1 = t end -t 2 = ω ...
specific Embodiment approach 3
[0088] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is: the specific process of step four is:
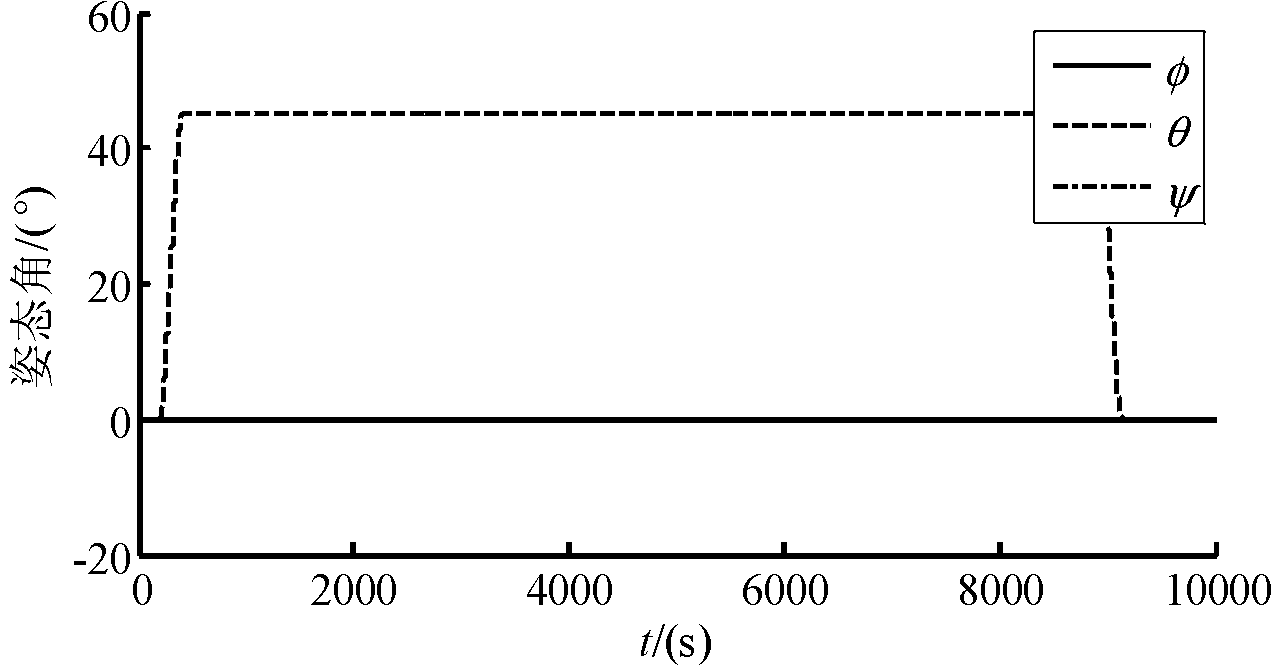
[0089] Step 41: Make the magnitude of the gravity gradient moment take the maximum value, that is, θ m = 45°, calculate the angular momentum h accumulated during the satellite maneuvering from 0° to 45° manu (45°), the angular momentum accumulated in the process of the satellite maneuvering from 0° to 45° is the same as the angular momentum accumulated in the process of the satellite maneuvering from 45° to 0°, therefore, when the maneuvering angle θ m = 45°, the sum of angular momentum accumulated during satellite maneuvering is 2h manu (45°);
[0090] Step 42: Compare|2h manu (45°)|with|h un_y |Size:
[0091] if h un_y |≥|2h manu (45°)|Then take θ m = 45°;
[0092] if h un_y |manu (45°)|, then θ m should satisfy the equation:
[0093] h un ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More