

GNSS/MINS (global navigation satellite system/micro-electro-mechanical systems inertial navigation system) super-deep combination navigation method, system and device
A deep integrated navigation and integrated navigation technology, applied in the field of GNSS/MINS ultra-deep integrated navigation methods, systems and devices, can solve the problems of nonlinear growth of phase detection error, degradation of tracking and positioning performance, and unsuitable tracking of vector loops.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
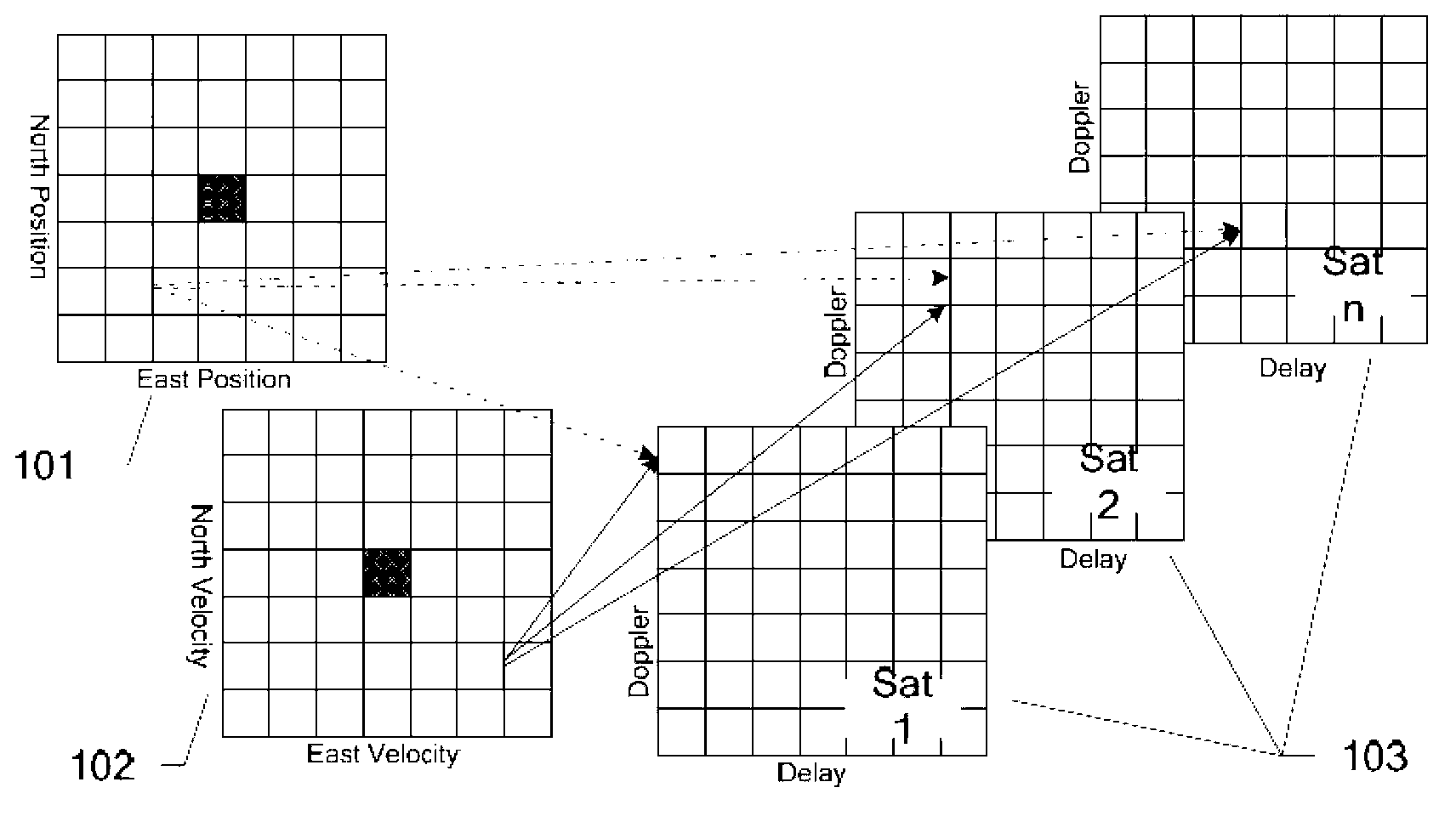
[0090] The essence and goal of any satellite positioning system is to determine the user's position and velocity. Based on this common point, the present invention proposes a positioning field concept based on position and velocity levels. Based on this concept, INS and GNSS can be combined at an ultra-deep level: using the position and speed assistance information provided by INS, GNSS uses the direct position estimation (DPE) algorithm to estimate position error, speed error, and clock error, thereby closing the loop . Because the system directly uses MIMU and baseband correlator as sensors, all navigation functions are realized in the top-level combination algorithm, that is, the algorithm uses GNSS baseband correlator as a sensor of sensitive space-time positioning field, and MIMU as a sensor of sensitive inertial field to realize It realizes the complete integration of GNSS and MINS. With the assistance of INS, GNSS combines multi-channel information for vector phase det...
Embodiment 2
[0172] like Image 6 Shown is the system architecture diagram of this embodiment. The GNSS / MINS ultra-deep integrated navigation system is mainly composed of a GNSS system, a MINS system and a correlator group 606 .
[0173] Among them, the GNSS system receives satellite signals through the antenna 601, and outputs the intermediate frequency signal after down-converting and sampling the satellite signals through the RF front-end 602, and receives satellite navigation messages; the MINS system obtains measurement data through the MIMU603, and passes through the strapdown inertial navigation system 604 After solving, the position, velocity and attitude of the carrier are obtained.
[0174] The system also includes:
[0175] The carrier frequency and code phase calculation unit 605 is used to combine the speed and position output by the MINS system with the satellite navigation message to calculate the GNSS signal carrier frequency and code phase to generate local signals;
[017...
Embodiment 3
[0184] This embodiment proposes a device applied to the method of Embodiment 1, such as Figure 7 shown.
[0185] The GNSS / MINS integrated navigation device includes: antenna 701 and radio frequency module 702, which introduces GNSS intermediate frequency data into the system through the interface of FPGA706; barometric altimeter 703, which introduces the barometric altitude data into the system through the interface of FPGA706; MIMU704, through the interface of FPGA706 The measurement data of MIMU704) is introduced into the system; and the power supply module 705, DSP708 and host computer 707.
[0186] Wherein, the integrated navigation device also includes a correlator group 709, the DSP708 will calculate the code phase, carrier frequency and projection vector, and write it into the FPGA706 through the EMIF bus, and the FPGA706 automatically divides the grid according to the size of the search grid and maps it to The correlator group 709, after the pre-detection integration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More