

Control system and control method of outdoor micro ground swarm robot
A swarm robot and control system technology, applied in the direction of total factory control, total factory control, electrical program control, etc., can solve problems such as measurement failure and measurement error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
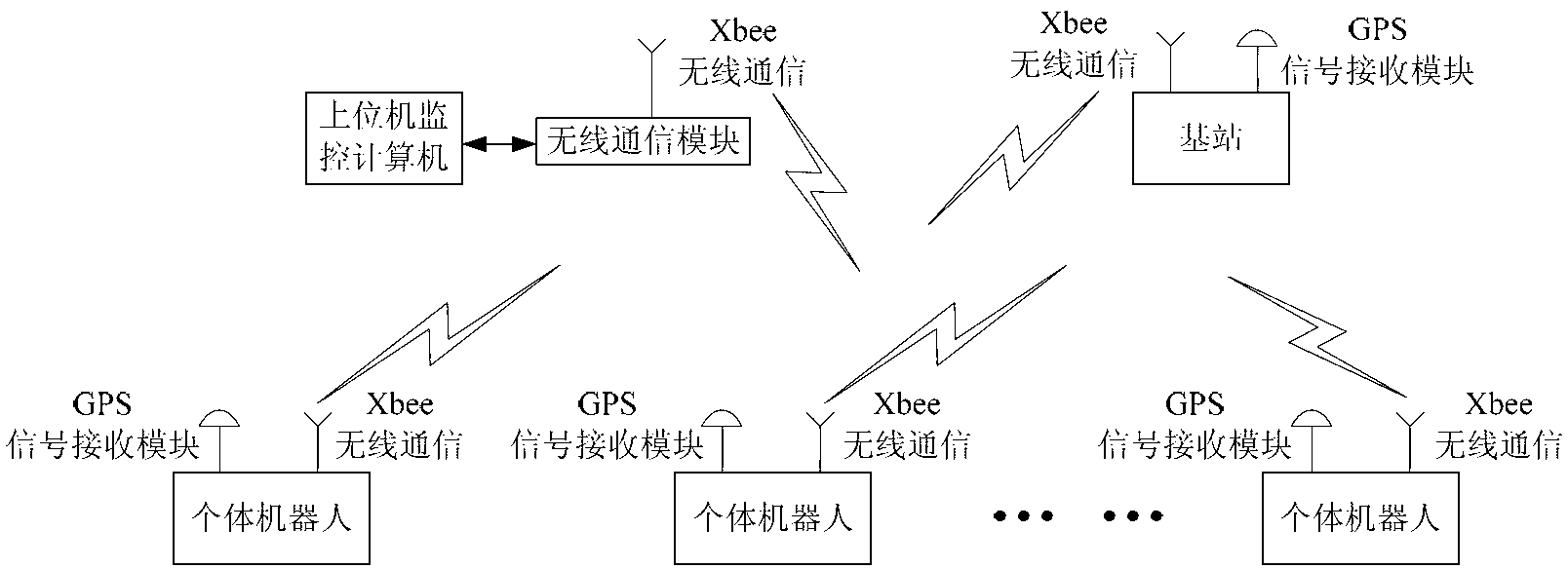
[0072] figure 1 It is a schematic diagram of an outdoor miniature ground group robot control system according to an embodiment of the present invention. Such as figure 1 As shown, an outdoor micro-ground group robot control system consists of a differential GPS base station, a micro-ground individual robot and a host monitoring computer. Wherein, the differential GPS base station is used to receive GPS signals in real time and perform pseudo-range difference calculation with the given base station reference coordinates [pseudo-range difference calculation is an existing technology, which is automatically calculated by OEMStar], and then the difference correction number is passed The wireless communication module sends to the group robots; the individual robots that constitute the group robot system are miniature ground mobile robots with the same hardware, and a plurality of individual robots form a robot group through wireless communication and realize mutual cooperation; T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More