

Wireless locating method of mixed-type multiple-mobile-robot system
A mobile robot and wireless positioning technology, which is applied to radio wave measurement systems, satellite radio beacon positioning systems, instruments, etc., can solve the problems of multiple equipment and complex positioning methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
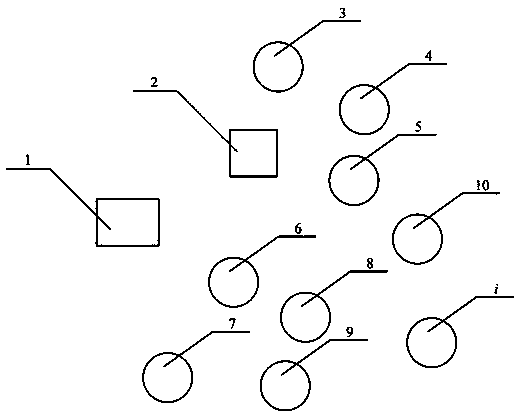
[0030] Example: refer to figure 1 , a hybrid multi-robot wireless positioning system consists of a monitoring center 1, a robot 2 with a known position and a plurality of robots i (i=3, 4, 5...N) with unknown positions. The monitoring center 1 can control the movement of the robot with known position and the robot with unknown position, and can display the result of system positioning. This position shows that robot 2 has sufficient energy supply, strong computing power, and relatively high motion accuracy; multiple unknown robots i (i=3,4,5...N) are small in size, light in weight, and have limited computing resources. With a small number of sensors, but with wireless communication capabilities, it can communicate wirelessly with the position-aware robot 2.
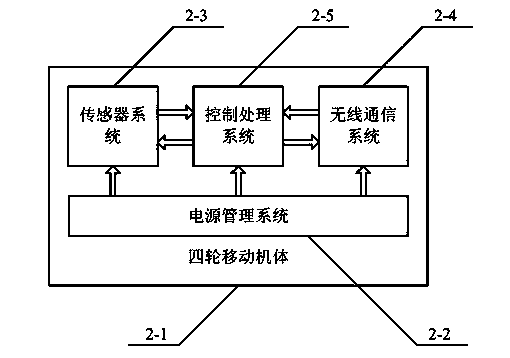
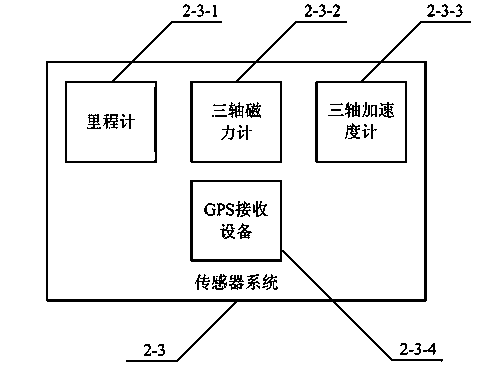
[0031] refer to figure 2 with image 3 , the described position shows that the robot 2 is composed of a four-wheel mobile body 2-1, a power management system 2-2, a sensor system 2-3, a wireless communication system 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More