

Partition method for orderly extracting point cloud on ground
A technology of non-ground points and ground parts, applied in image analysis, image data processing, instruments, etc., can solve the problems of incomplete segmentation and influence, and achieve the effects of increased accuracy, low algorithm complexity, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] like image 3 As shown, this embodiment describes a point cloud segmentation method for orderly extracting the ground, including the following steps:
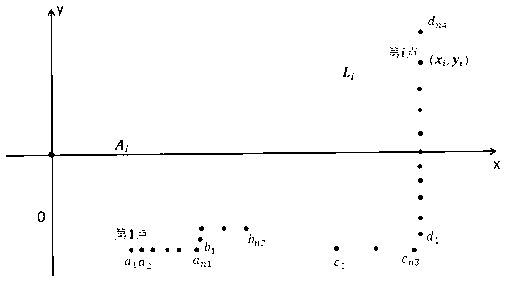
[0051] S1: The depth sensor scans the measured scene column by column, and set the column number j to j=0 when the first column is set.
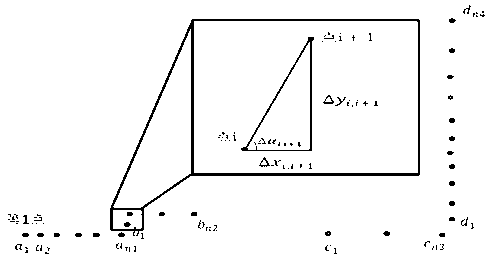
[0052] S2: According to the angle change relationship between adjacent points in the depth sensor coordinate system, obtain the corresponding local coordinates of the part belonging to the ground before the cut-off point i in the depth sensor depth information of the column and the point in the column;
[0053] S3: In the depth sensor coordinate system and the local coordinate system, determine whether the point after point i belongs to the ground;
[0054] S4: Determine whether the depth information of each column of depth sensors in the measured scene has been processed, if so, the extraction of the ground part of the point cloud is completed, and proceed to step S5; otherwise set j...
Embodiment 2
[0080] This embodiment records a technical solution of an orderly ground point cloud segmentation method that is basically the same as the technical solution of Embodiment 1, the difference being that the depth sensor scans the measured scene column by column from top to bottom, each column Among the points corresponding to the depth information, the first point is the end point, and the last point is the start point.
Embodiment 3
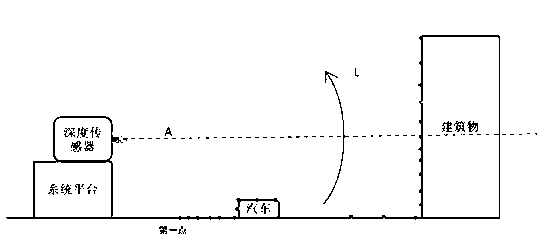
[0082] This embodiment describes a point cloud segmentation method for orderly extracting the ground. The platform is a fixed station platform, and the depth sensor and position and attitude sensor are placed at a fixed position, and the depth information of the surrounding scene is collected through the rotation of the depth sensor. The depth sensor adopts a scanning method from bottom to top or from top to bottom, and the technical solutions adopted are the same as those in Embodiment 1 and Embodiment 2 respectively.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More