

A method for measuring the depth and three-dimensional size of lesion tissue under capsule endoscope
A technology of capsule endoscopy and measurement methods, which can be used in diagnostic recording/measurement, medical science, sensors, etc., and can solve problems such as the accuracy and speed need to be improved, the time used should not be long, and the process is complicated.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
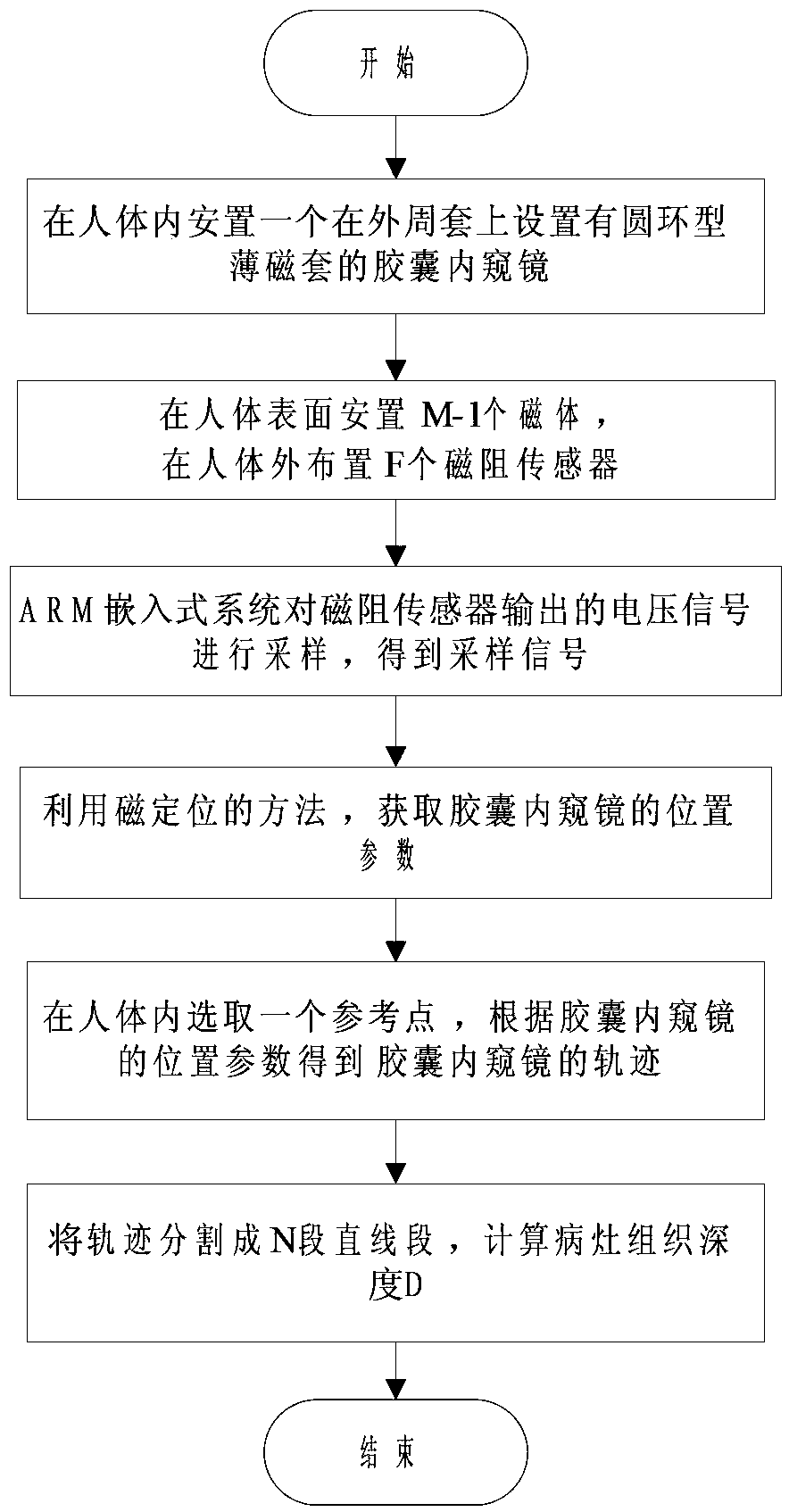
[0100] In this embodiment, a method for measuring the depth of a capsule endoscope lesion tissue is proposed. The flow chart of the measuring method is as follows: figure 1 shown, including the following steps:
[0101] ①Accurate position parameters of capsule endoscope are obtained by placing magnets and magnetoresistive sensors. The specific process is as follows:
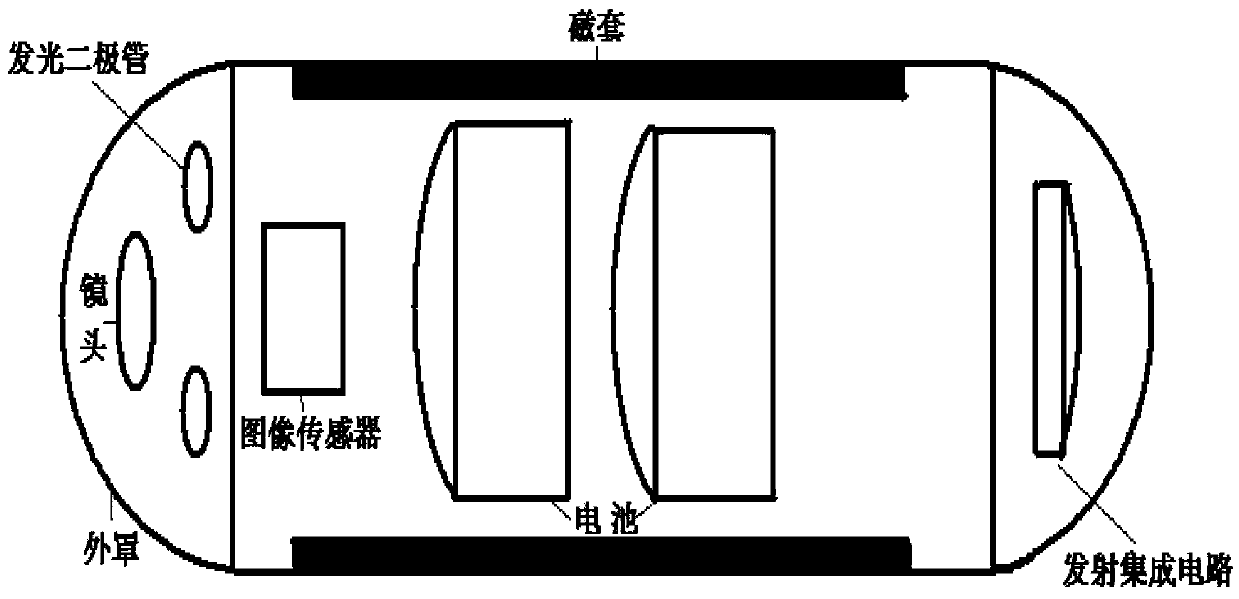
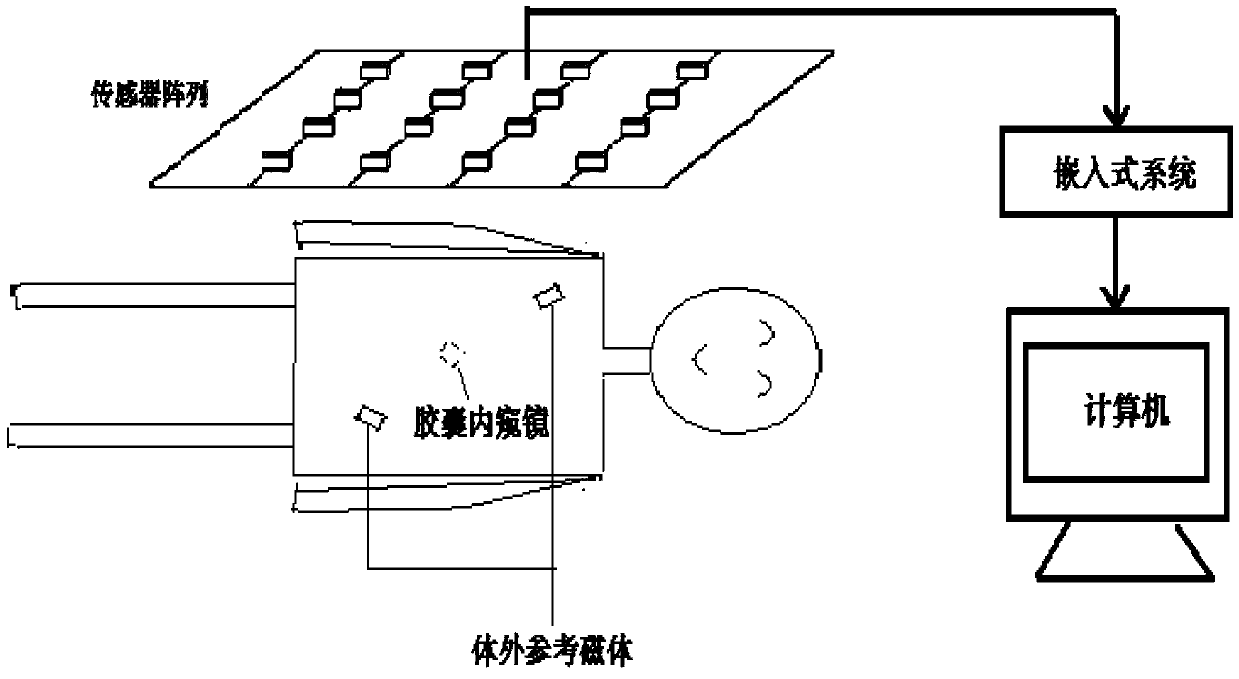
[0102] ①-1, such as image 3 , a space coordinate system is established outside the human body as a reference coordinate system, and a capsule endoscope with a ring-shaped thin magnetic sleeve set on the outer peripheral sleeve is placed inside the human body. The capsule endoscope structure is as follows figure 2 As shown, before obtaining the position parameters of the capsule endoscope, M-1 magnets are placed on the surface of the human body, and together with the annular thin magnetic sleeve of the capsule endoscope, M magnets are formed, which are determined by the arranged M magnets The three-dimensional...
Embodiment 2
[0125] In this embodiment, a method for measuring the three-dimensional size of a capsule endoscope lesion tissue is proposed, and the flowchart of the method is as follows: Figure 7 shown, including the following steps:
[0126] (1) Accurate position parameters and orientation parameters of the capsule endoscope before and after the movement of the capsule endoscope, as well as the rotation of the capsule endoscope around the central axis after the movement of the capsule endoscope, are obtained by arranging the magnet and the magnetoresistive sensor. angle, the specific process is as follows:
[0127] ⑴-1, such as image 3 , a space coordinate system is established outside the human body as a reference coordinate system, an image sensor is placed outside the human body, and a capsule endoscope with a ring-shaped thin magnetic sleeve on the outer peripheral sleeve is placed inside the human body. structure as figure 2 As shown, before acquiring the position parameters of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More