

Manipulator positioning system of weeding robot
A weeding robot and positioning system technology, which is applied in the field of weeding robot manipulator positioning system, can solve the problems of inaccurate weeding between seedlings, unclean weeding, and damage to seedlings, etc., achieve high weeding efficiency and increase weeding depth Consistency, clean weeding results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
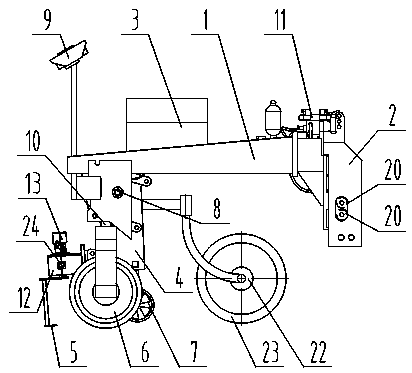
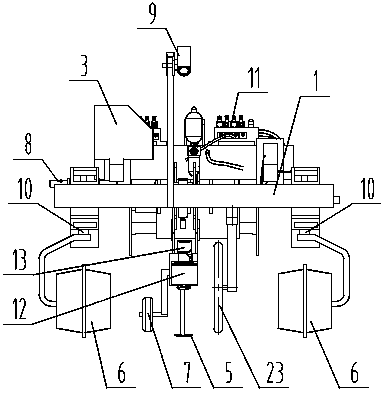
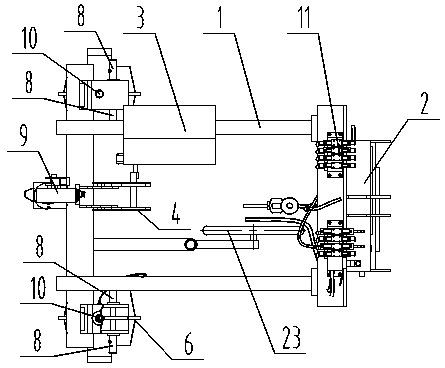
[0020] Such as figure 1 , figure 2 , image 3 As shown, a schematic structural view of a specific embodiment of the manipulator positioning system of the weeding robot of the present invention is provided, including a frame 1 and a suspension frame 2 installed on the frame 1, a lifting profiling device, a positioning control system, and a speed measuring wheel 23, And the robot weeding unit installed on the lifting profiling device, the robot weeding unit includes weeding manipulator 5, support 12, manipulator drive motor 13, and the positioning control system includes setting computer and PLC programmable logic The positioning controller 3 of the controller, the seedling grass identification industrial camera 9 that is arranged on the front beam of the frame 1, the travel speed sensor 22 that is arranged on the speed measuring wheel 23, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More