

Auxiliary mechanical arm for soft lens operation and method for achieving same
A manipulator and soft mirror technology, applied in the field of medical devices, can solve the problems of inability to realize precise multi-directional manipulation of flexible devices, jitter, and damage to flexible devices, so as to improve the probability of successful surgery, prevent jitter, and avoid danger.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
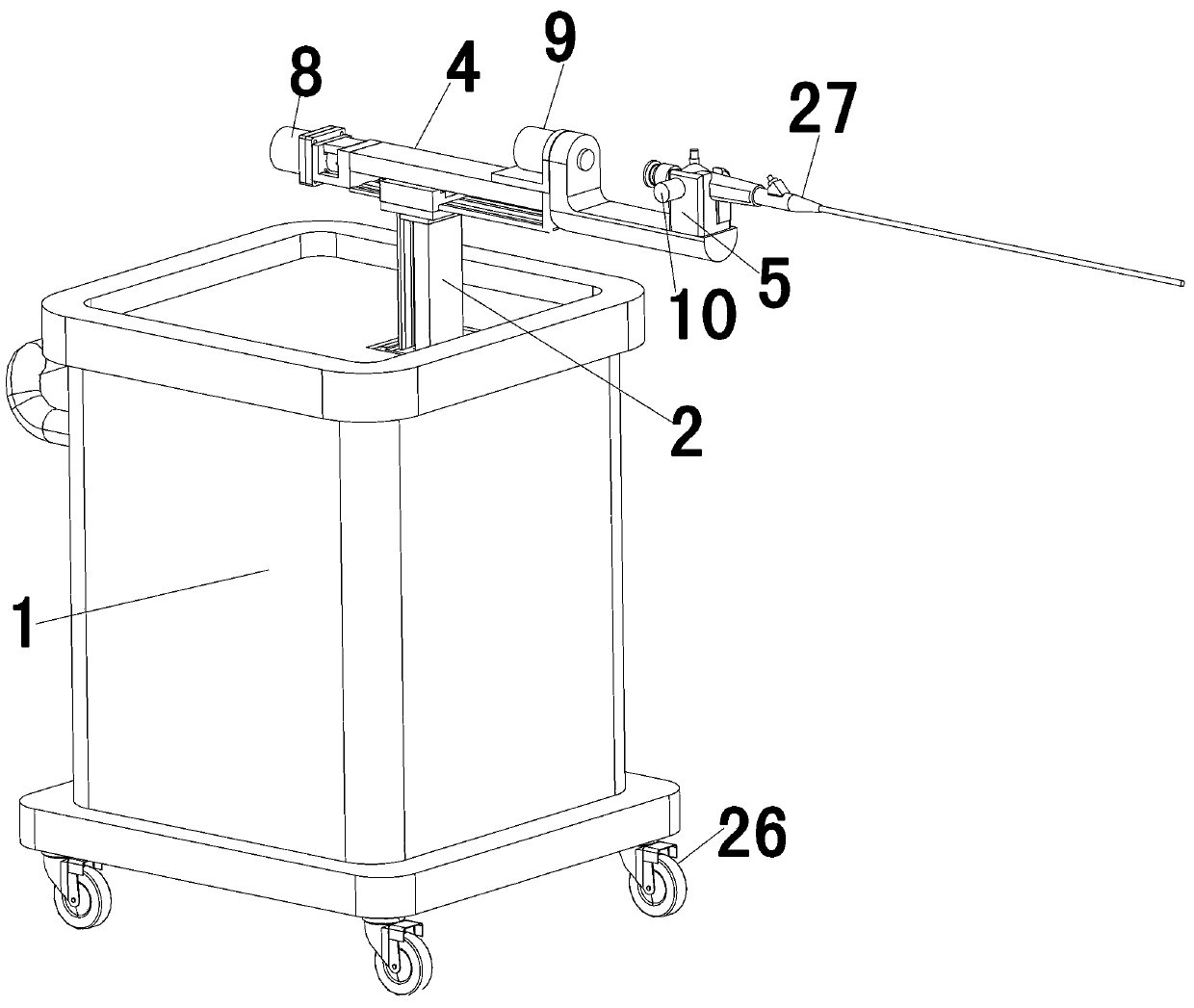
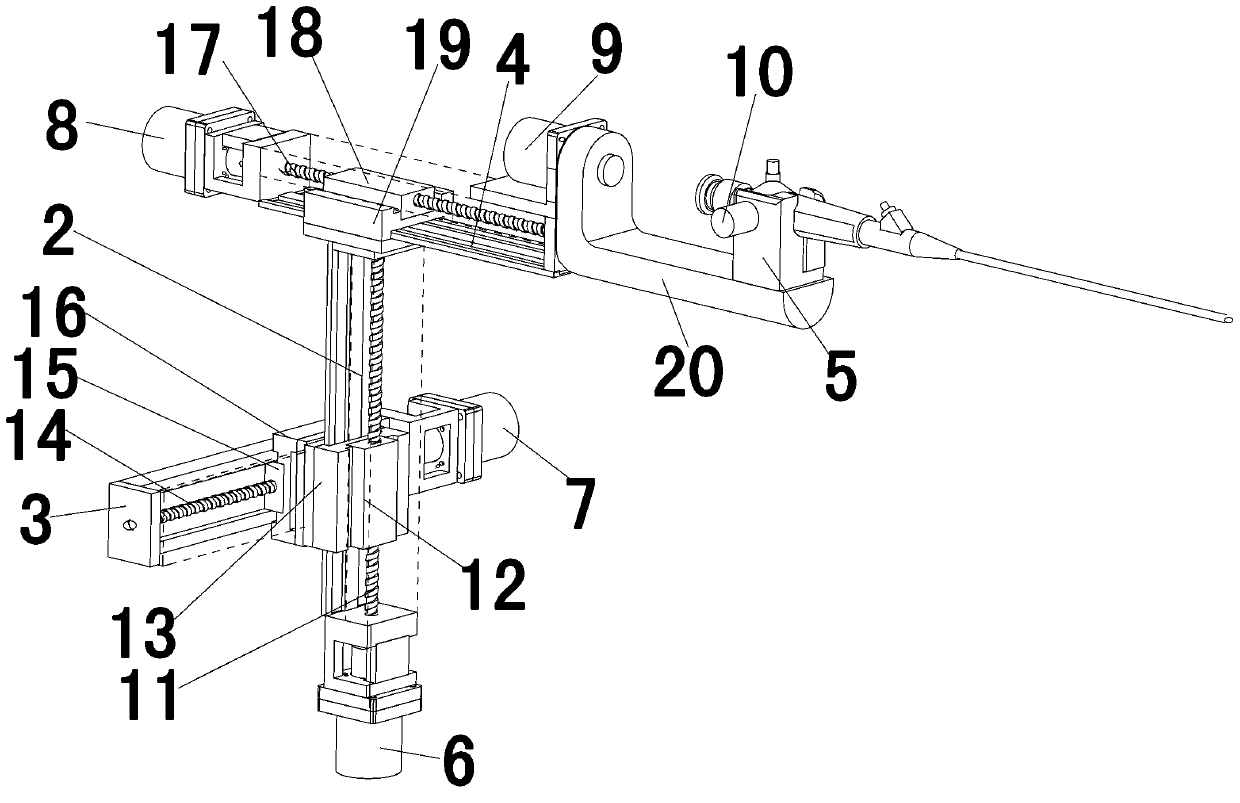
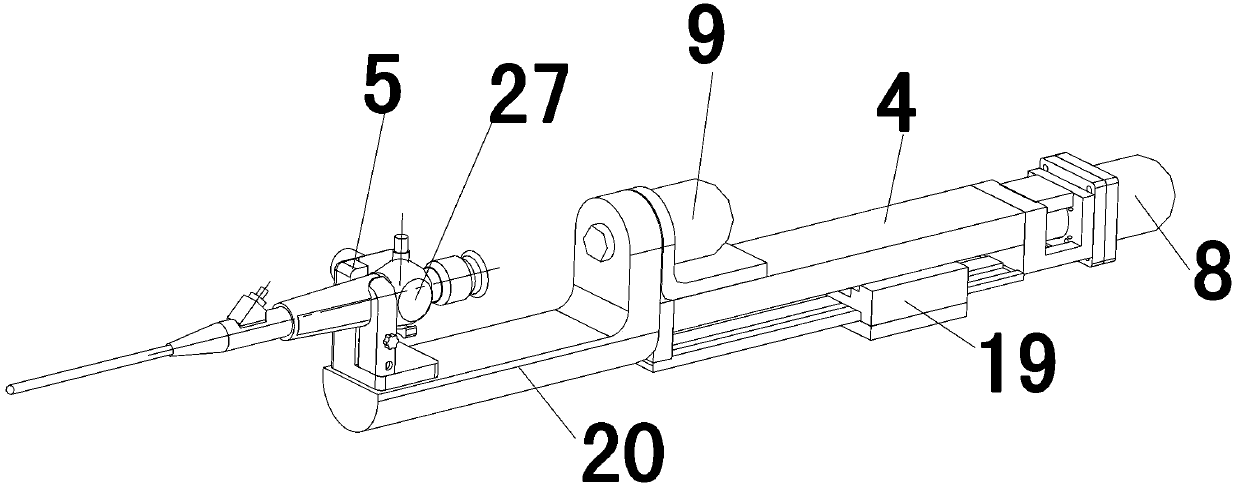
[0049] Such as Figure 1~5 As shown, an auxiliary manipulator for soft lens surgery includes a base 1, a vertical upper and lower manipulator 2, a horizontal left and right manipulator 3, a front and rear telescopic manipulator 4, a soft lens holder 5, an upper and lower dimension drive motor 6, left and right Dimension drive motor 7, front and rear dimension drive motor 8, shaft dimension drive motor 9 and soft lens dial dimension drive motor 10; among them, such as figure 2 As shown, the vertical upper and lower manipulator 2 is provided with a first screw 11 and a first screw nut 12, the first screw nut 12 is connected with the first slider 13, and the upper and lower dimension driving motor 6 drives the first screw 11 to rotate. , Drive the first slider 13 to slide, the horizontal left and right mechanical arms 3 are provided with a second screw 14 and a second screw nut 15, the second screw nut 15 is connected to the second slider 16, and the left and right dimensional dri...
Embodiment 2
[0064] The difference between this embodiment and the first embodiment is: the upper and lower dimension drive motor 6, the left and right dimension drive motor 7, the front and rear dimension drive motor 8, the shaft dimension drive motor 9, and the soft mirror dial dimension drive motor 10 are all servo motors, which move The bottom of the table is equipped with fixed feet with adjustable height. In the specific operation, the soft scope is first inserted into the urethra and ureter of the prosthesis through the ureteral guide sheath, and then into the renal pelvis, and then the handle of the soft scope is manually placed and fixed on the soft scope holder as required. Display the whole process of entering the renal collection system with the soft mirror on the touch screen (with image display function), including renal pelvis, upper calyx, middle calyx, and lower calyx, and observe the renal collection system; turn on the corresponding function button on the touch screen of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More