

Adaptive cruise control method based on approximate policy iteration
A technology of adaptive cruise and control methods, applied in special data processing applications, instruments, electrical digital data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples.
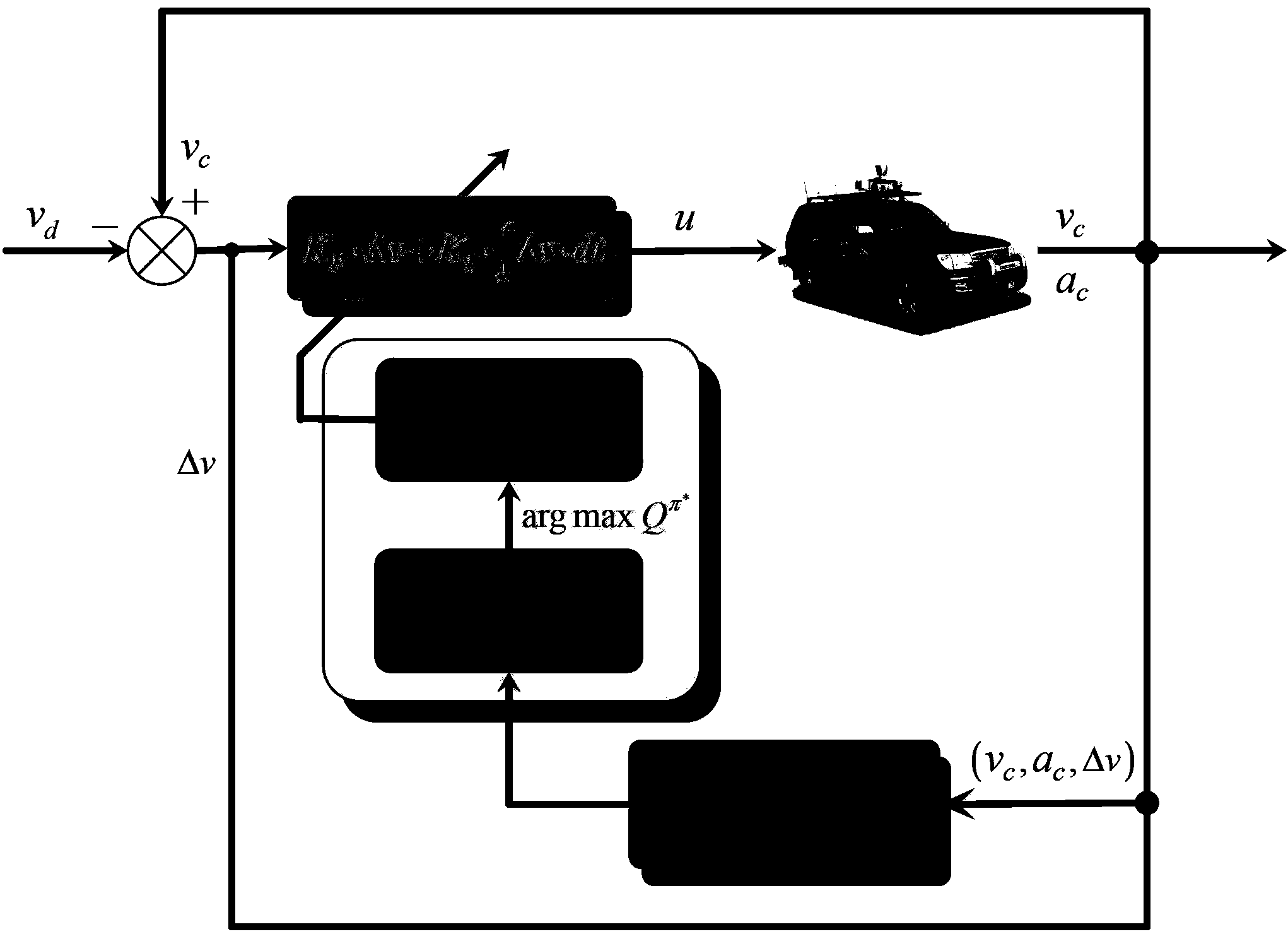
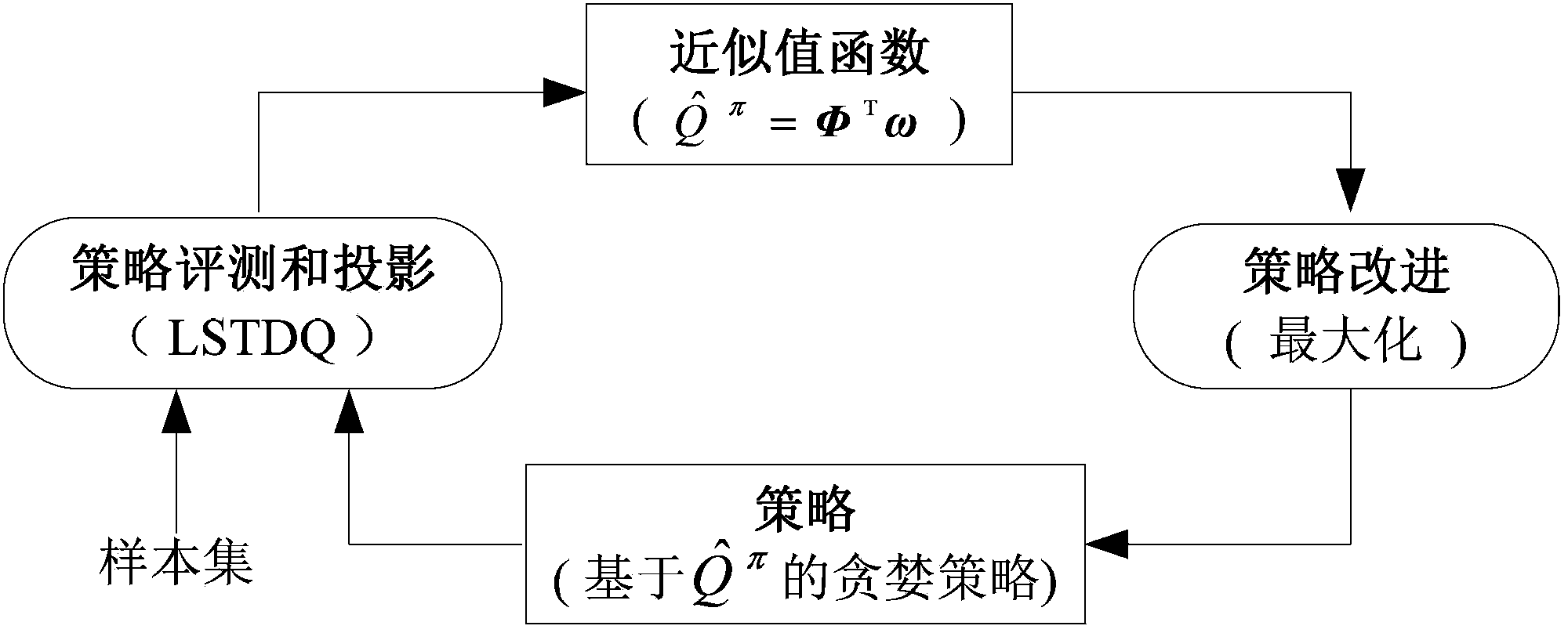
[0055] The adaptive cruise control method based on the approximate strategy iteration of the present invention adopts an off-line approximate strategy iterative learning algorithm, and the entire optimization algorithm is divided into three stages: firstly, collecting samples; secondly, using the approximate strategy iterative algorithm to learn on the samples, and obtaining An approximate optimal strategy; finally optimize the PI controller parameters online in the cruise control, that is, use the approximate optimal strategy to optimize the parameters of the PI controller online in a data-driven manner, so that the cruise control can achieve the desired performance. In a specific example, the specific process is as follows:
[0056] (1) Sample collection;
[0057] A sample is organized as follows:
[0058] (s,a,r,s')
[0059] The ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More