

A nanorobot control device
A nano-robot and control equipment technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of precise control without intelligent control system, and achieve humanized operation process, high control accuracy, high efficiency and good controllability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0024] Any feature disclosed in this specification, unless specifically stated, can be replaced by other alternative features that are equivalent or have similar purposes. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
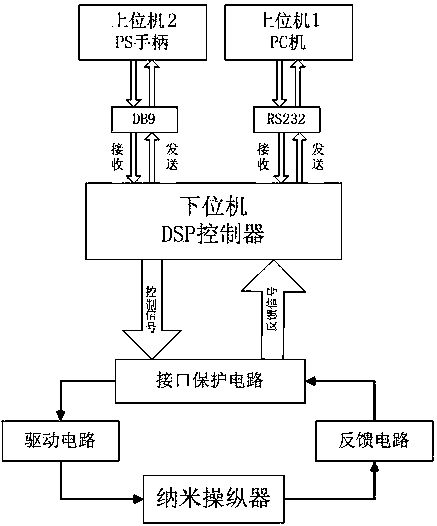
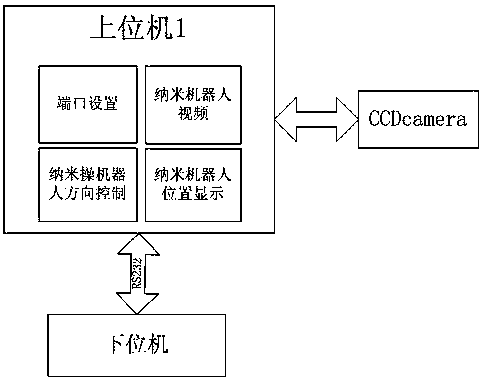
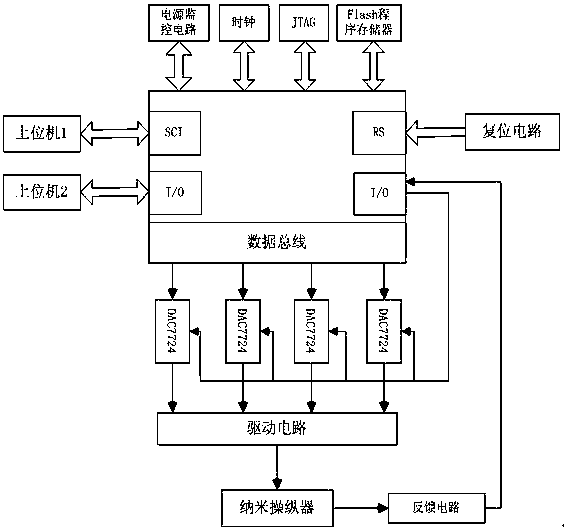
[0025] Electron microscopy in situ nanorobot electronic control device structure such as figure 1 As shown, the control device is an embedded controller controlled by a DSP chip as the core, including an upper computer 1PC, an upper computer 2PS handle, a lower computer DSP controller, an interface protection circuit, a drive circuit, and a feedback circuit. There are two kinds of upper computers, the upper computer 1 is a PC, which is used to realize automatic control, and the upper computer 2 is a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More