

Neural network generalized inverse decoupling controller of automobile chassis integrated system and construction method
A neural network and automobile chassis technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of dependence on mathematical models, non-linear coupling relationship of automobile chassis integration system, and decoupling matrix dimension Huge and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
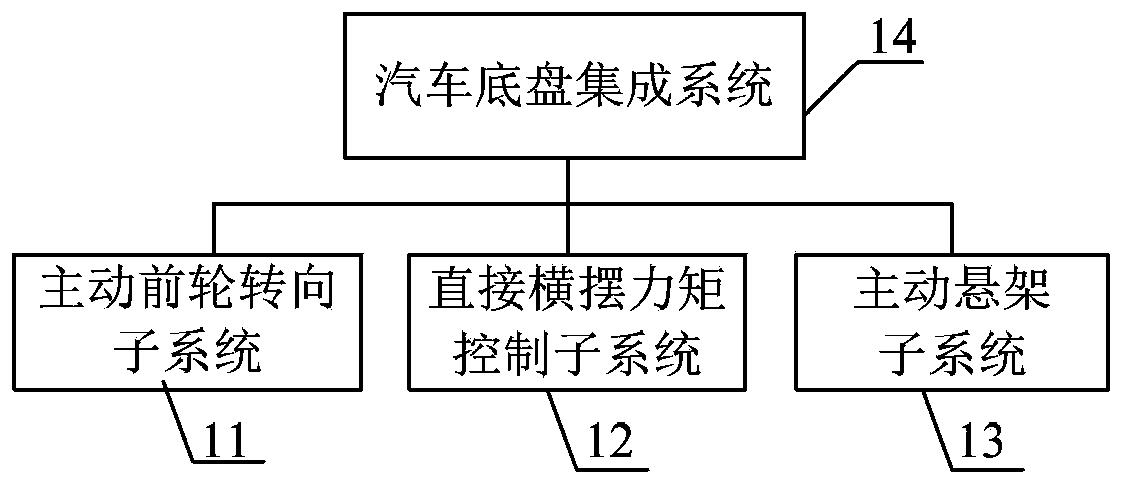
[0050] Such as figure 1 and Figure 5 As shown, according to a preferred embodiment of the present invention, the neural network generalized inverse controller of the automobile chassis integrated system is composed of a neural network generalized inverse 22 and a linear closed-loop controller 41, wherein the automobile chassis integrated system 14 is steered by the active front wheels of the automobile chassis Subsystem 11, direct yaw moment control subsystem 12 and active suspension subsystem 13 are composed.
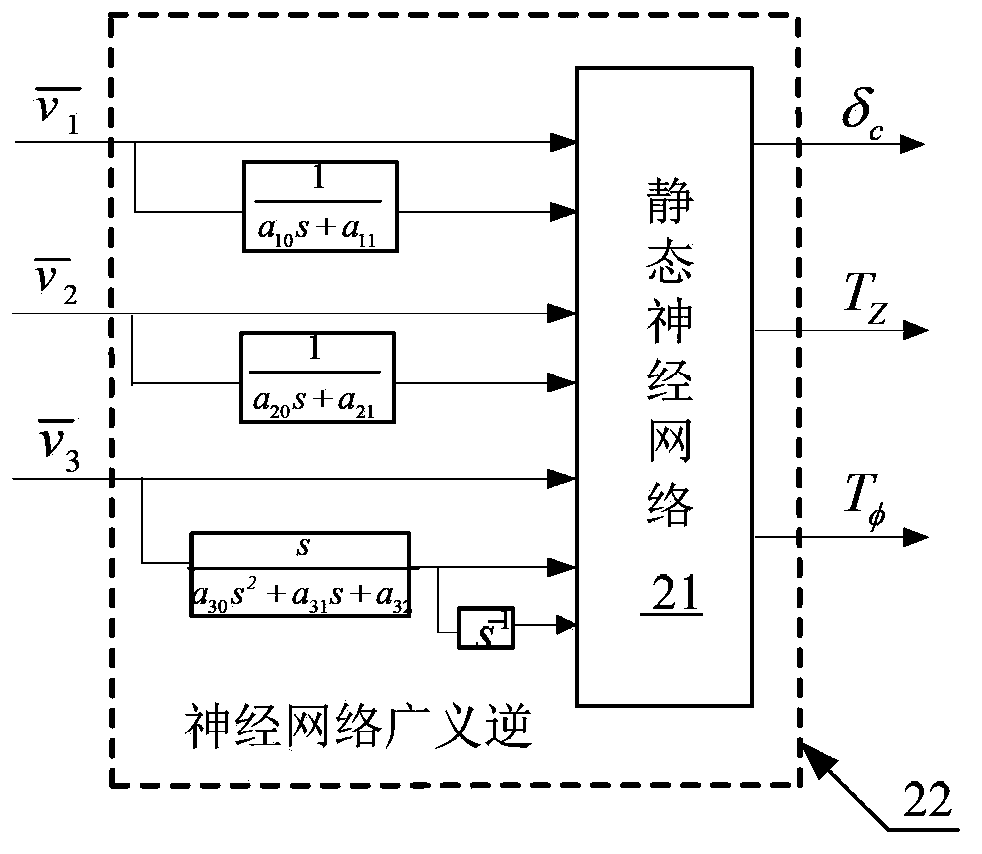
[0051] Such as figure 2 , the neural network generalized inverse 22 is composed of a static neural network 21 and four linear links, and the static neural network 21 has seven input nodes and three output nodes.
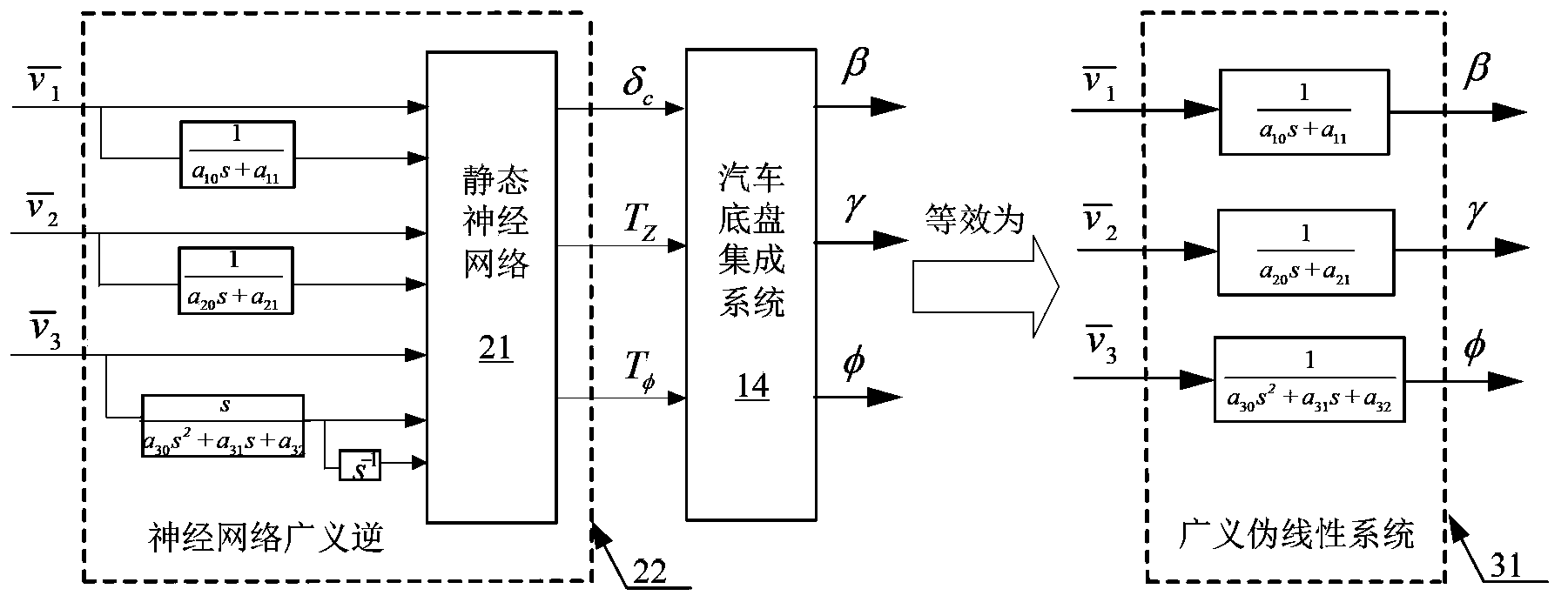
[0052] refer to image 3 , the neural network generalized inverse 22 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More