

Pitching angle tracking control method of follow-up system
A technology of angle tracking and control method, which is applied in the direction of using feedback control, etc., can solve the problems that cannot realize fast and high-precision tracking control, and achieve the effect of high-precision target tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation.
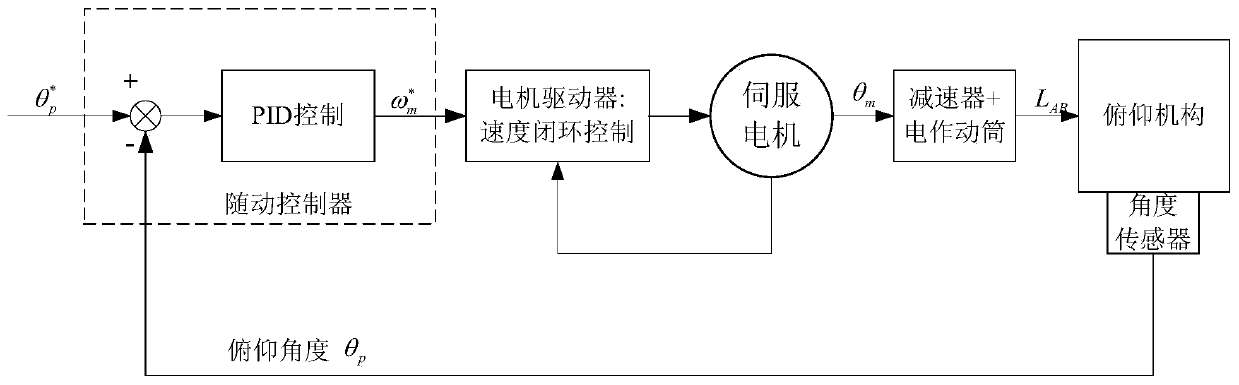
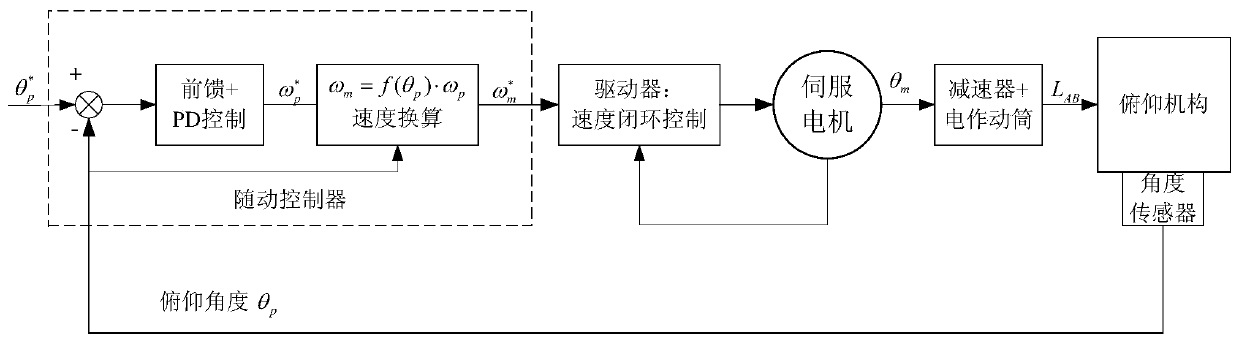
[0024] A follow-up system pitch angle tracking control method is characterized in that the method includes the following content:
[0025] Compare pitch given angle value and pitch angle feedback value θ p , calculate the angle error, use the feedforward plus proportional derivative control algorithm, and output the given value of the pitch speed Using the speed conversion equation ω m * =f(θ p )·ω p * , the given value of the pitch rate Conversion to motor speed reference output to the motor driver;
[0026] The feedforward plus proportional derivative control algorithm is as follows:
[0027]
[0028]
[0029] Among them, K p is the proportional gain, K d is the differential gain,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More