

RBF neural network generalized inverse internal model control method of linear motor
A linear motor and neural network technology, applied in the field of power transmission, can solve the problems of poor anti-interference ability of permanent magnet linear motors, and achieve the effect of superior key performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Now in conjunction with the accompanying drawings, the examples of the present invention will be described in detail.
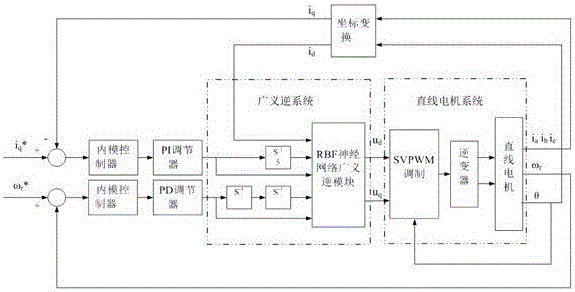
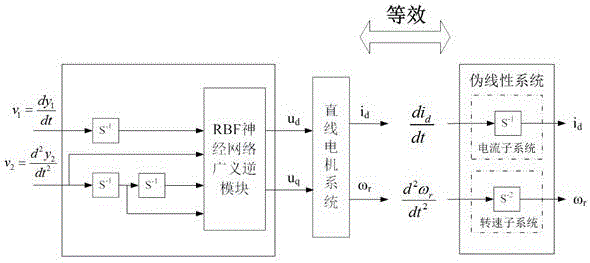
[0016] Such as figure 1 As shown, the linear motor RBF neural network generalized inverse internal model control method includes: generalized inverse system, linear motor system, PI regulator, PD regulator, internal model controller, and coordinate transformation module. The generalized inverse system includes: RBF neural network generalized inverse module, current loop first-order integral module, speed loop second-order integral module; linear motor system includes: SVPWM modulation module, inverter, linear motor module.
[0017] The output end of the linear motor is measured and calculated by the photoelectric rotary encoder and the transformer used to detect the phase current to obtain the rotational speed ω r , electrical angle θ, phase current i a i b i c . The two rotating coordinate currents obtained by changing the coordinates of the pha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More