

Linearity decoupling method based on kalman filter and repeated collection of multivariate force
A technology of Kalman filtering and multiple acquisition, applied in the field of multi-dimensional force sensor decoupling, can solve the problems of low yield, low practicability, affecting the decoupling accuracy of multi-dimensional force sensors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
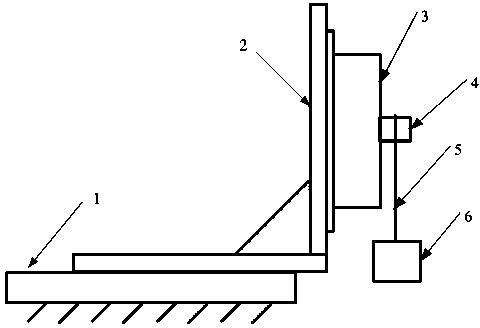
[0085] The present invention takes the cross-beam type three-dimensional wrist force sensor developed by Jiangsu Key Laboratory of Remote Measurement and Control Technology of Southeast University as an example to illustrate the implementation process of the decoupling method. The three-dimensional force sensor adopts the structure of cross beam and floating beam, and the resistance strain gauges are respectively pasted on the cross beams of the sensor. The elastic body of the three-dimensional force sensor causes a small deformation of the cross beam. signal and output.
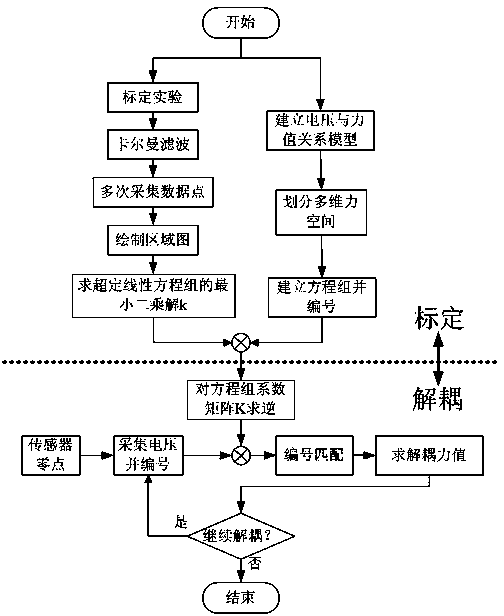
[0086] figure 1 It is a flowchart of the decoupling method of the present invention. It is divided into two parts: calibration and decoupling. The data obtained from the calibration experiment prepares for reliable decoupling. After the calibration of the multi-dimensional force sensor is completed, only the process of the decoupling part needs to be completed during use.
[0087] A linear decoupling metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More