

Inertial navigation system (INS)/wireless sensor network (WSN) indoor mobile robot tight-integration navigation-oriented iterative extended RTS average filtering method
A mobile robot, mean filtering technology, applied in navigation calculation tools and other directions, can solve problems such as incomplete compliance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further explained below in conjunction with the accompanying drawings.
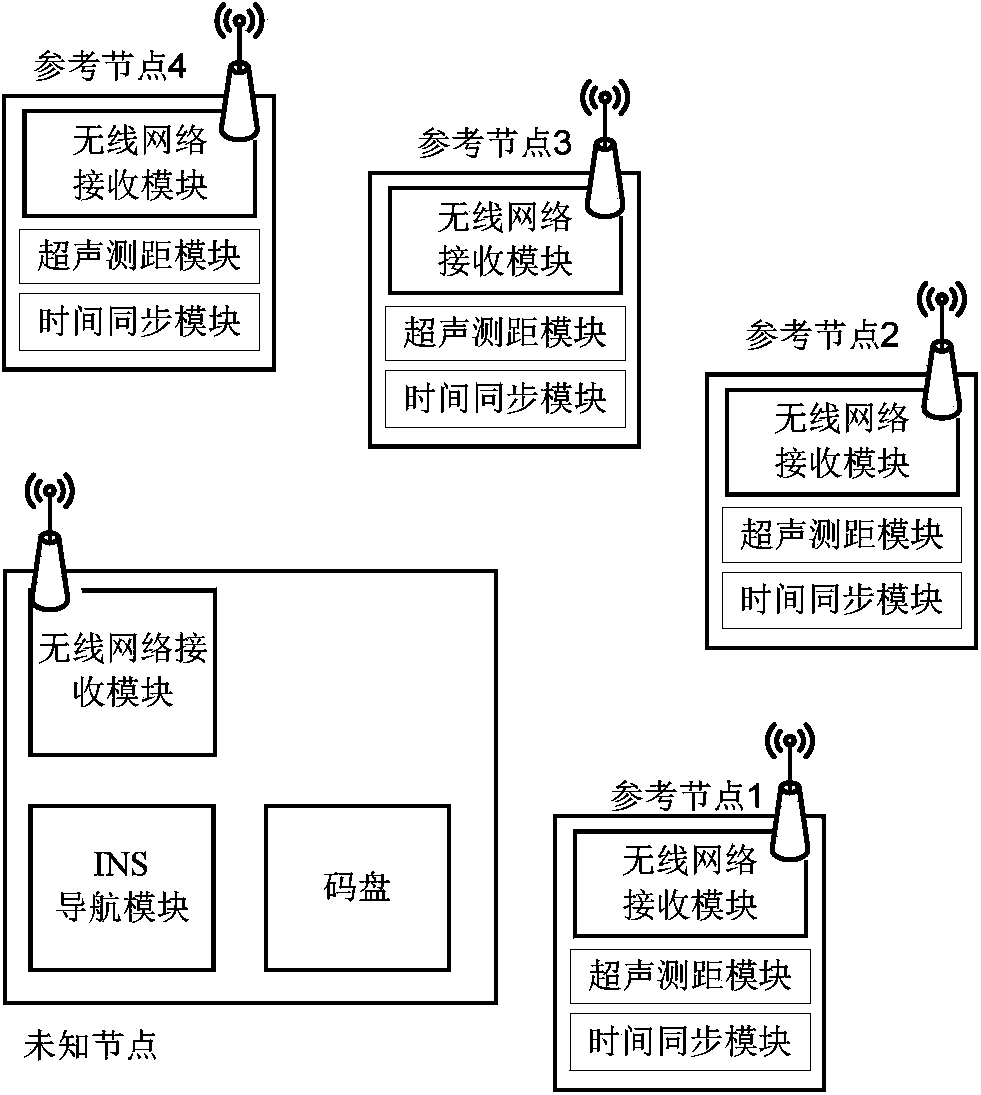
[0040] Such as figure 1 As shown, the iterative extended RTS mean filtering method for tight integrated navigation of INS / WSN indoor mobile robots includes the reference (RS) node part and the unknown (BN) node part. The reference node part is composed of a reference node wireless network receiving module, an ultrasonic ranging module and a time synchronization module. Among them, the reference node wireless network receiving module is mainly responsible for completing the sending and receiving of remote commands. Then turn on the ultrasonic ranging module to measure the corresponding distance information, and finally, return the distance information measured by the ultrasonic ranging module to the unknown node through the reference node wireless network receiving module; the unknown node part is received by the unknown node wireless network Module, INS navigation mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More