

Multi-robot pollution control method based on Voronoi diagrams
A pollution control, multi-robot technology applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The invention will be described in further detail below in conjunction with the accompanying drawings.
[0048] Figure 5 Be the flowchart of pollution control method of the present invention, the present invention is made up of module P1, P2, P3 and P4, and each module comprises as follows:
[0049] (1) Module P1: Divide the perception area
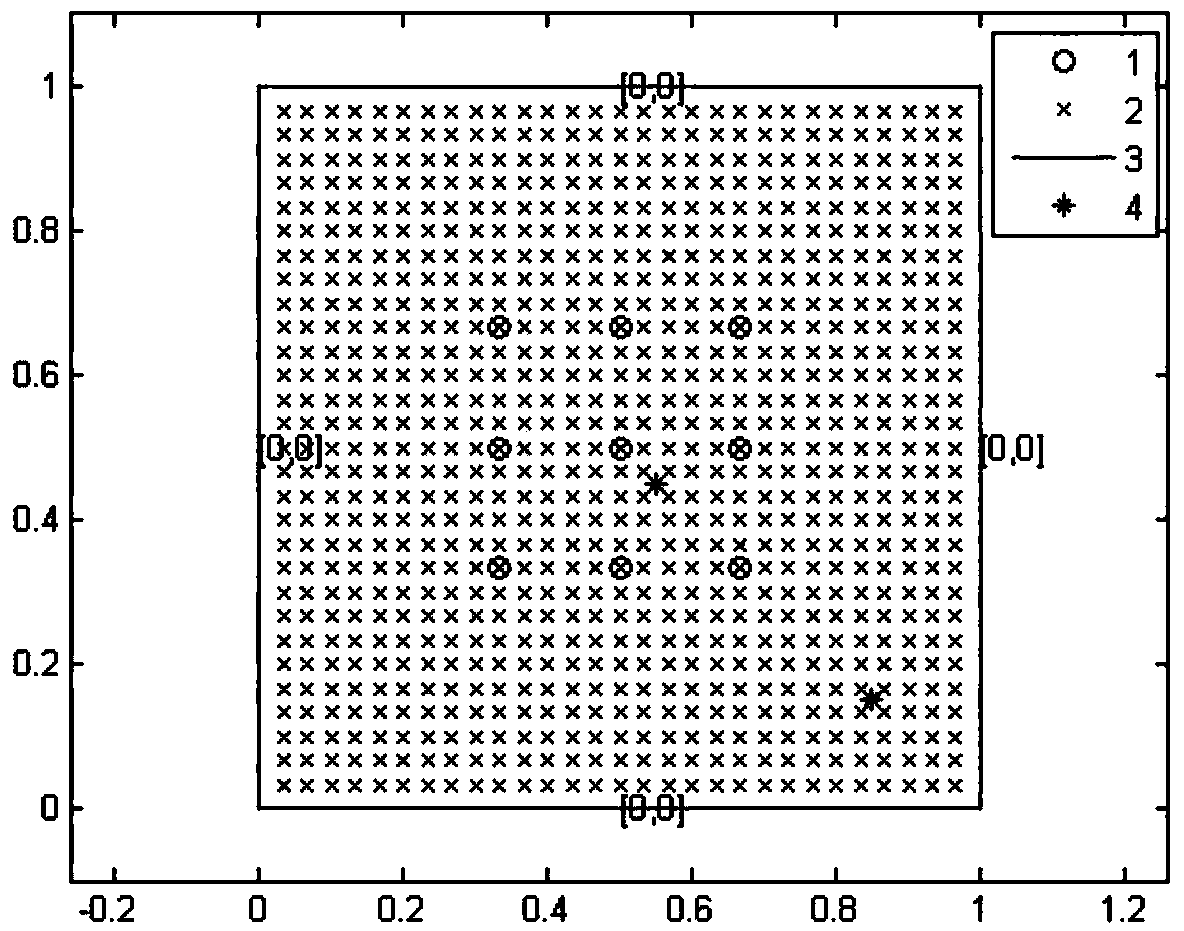
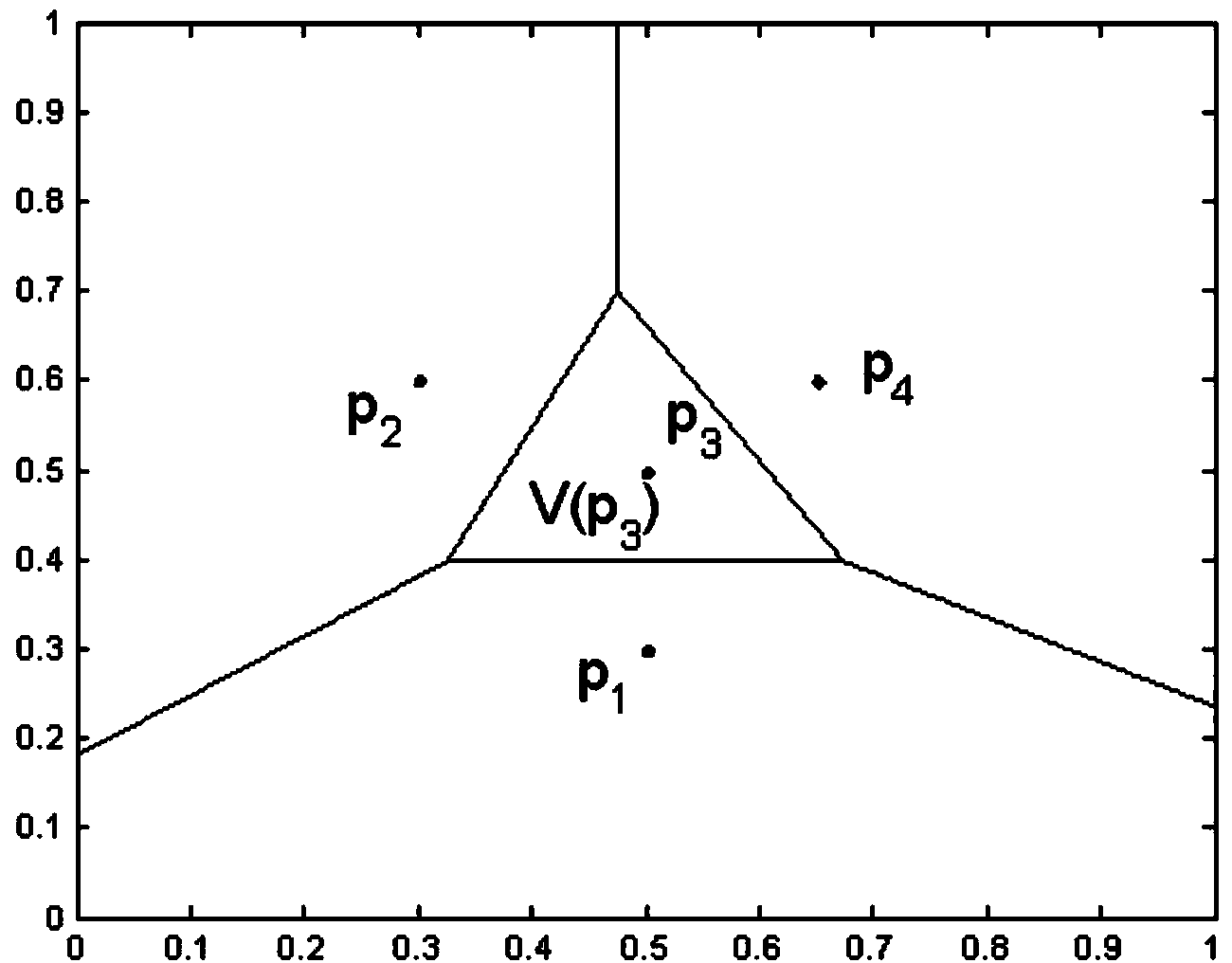
[0050] Because the present invention is based on the design method of Voronoi diagram, thereby dividing out the Voronoi perception subgraph under the controlled environment area is the premise of control, such as figure 1 , place the robot, pollution sources and obstacles in the two-dimensional coordinate system. robot p 3 The Voronoi subgraph V(p 3 )Such as figure 2 shown.
[0051] The first step: from the position p of robot i i (x i ,y i ) to calculate the relationship with any point in the environment q(x q ,y q ) weighted distance:
[0052] d WP (q,p i ; i ) = (x q -x i ) 2 +(y q -y i ) 2 -w i ;
[005...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More