Initial alignment method for micro electro mechanical system (MEMS) strap-down inertial navigation adaptive square-root cubature Kalman filtering (SCKF)
A strapdown inertial navigation and initial alignment technology, applied in navigation calculation tools, navigation through velocity/acceleration measurement, measurement devices, etc., can solve the problems of filter numerical instability, high-order term truncation error, divergence, etc. Achieve the effect of improving alignment accuracy and self-adaptive ability, and increasing self-adaptive ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with accompanying drawing:
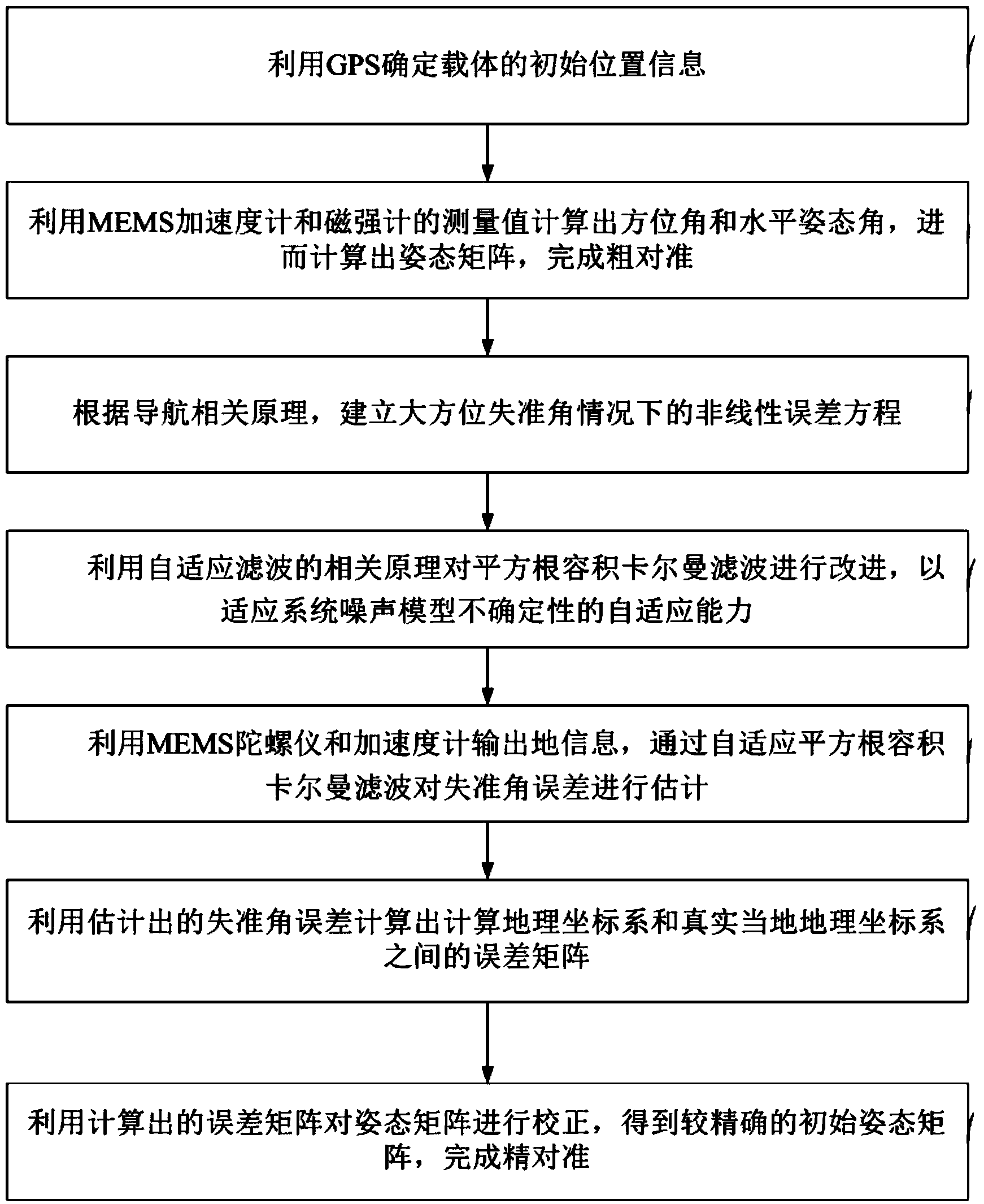
[0036] Such as figure 1 Shown: the present invention comprises the following steps:
[0037] (1) Use GPS to determine the initial accuracy and latitude parameters of the carrier;
[0038] (2) Collect data output by MEMS accelerometer and magnetometer;
[0039] (3) Analytical method is used to carry out the coarse alignment of the system, and the attitude matrix from the carrier coordinate system to the calculation geographic coordinate system is roughly obtained
[0040] C b c ( 0 ) = cos β 0 cos γ 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More