

Observable analysis based deep space probe autonomous-navigation method
A technology for deep space detectors and autonomous navigation, which is applied in the field of deep space exploration and can solve problems such as difficulty in satisfying navigation autonomy and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
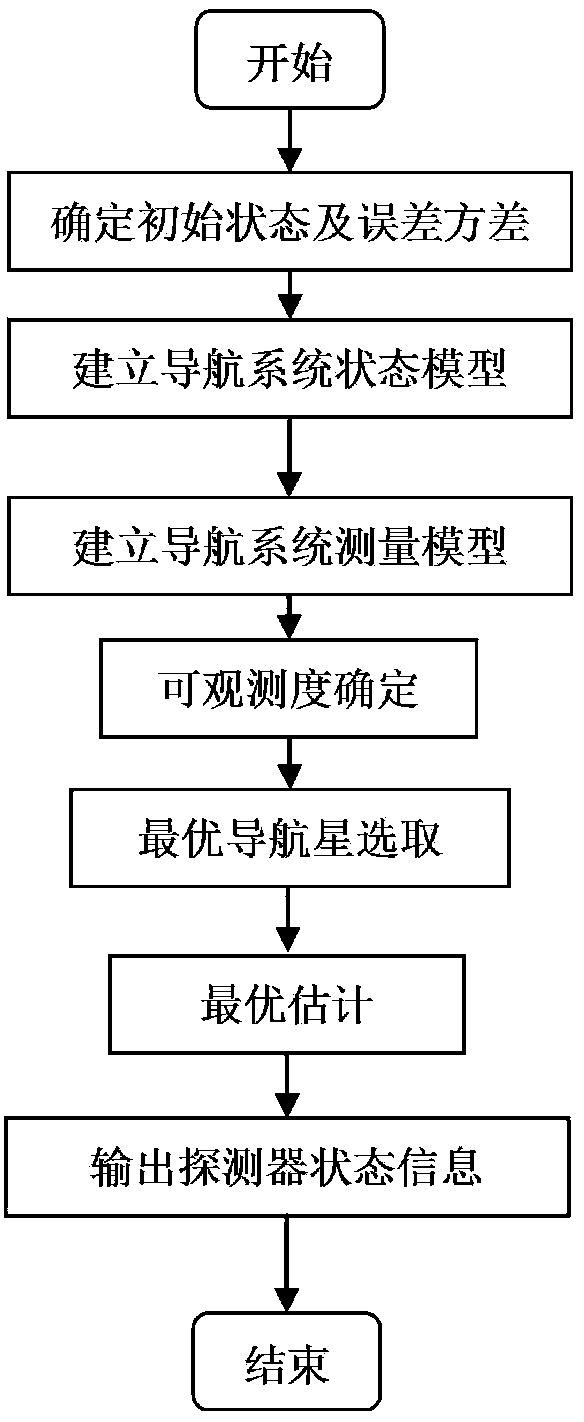
[0039] This example is aimed at the autonomous navigation scheme of the Mars exploration cruising segment. The navigation camera is used to provide navigation information for the optical measurement of the navigation stars (planets and asteroids). The optimal navigation star is selected through the observability analysis, and the combined Kalman filter is used for filtering solution. Calculate and realize high-precision real-time autonomous navigation. The specific implementation method of this example is as follows:
[0040] Step 1: Establishment of the state model of the Mars exploration cruise segment
[0041] The state model of the detector is established in the heliocentric inertial coordinate system. The state vector of the detector is the position vector r s =[r x ,r y ,r z ] T and velocity vector v s =[v x ,v y ,v z ] T . Considering the gravitational force of the sun, Mars and other perturbing forces, the state model of the probe in the Mars exploration cr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More