

Bionic caudal fin underwater propeller based on hydraulic artificial muscles
An artificial muscle and propulsion technology, applied in non-rotating propulsion elements and other directions, can solve the problems of rigid and inflexible movements, large energy loss, low swing frequency, etc., and achieve easy volume deformation, large load capacity, and high swing frequency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
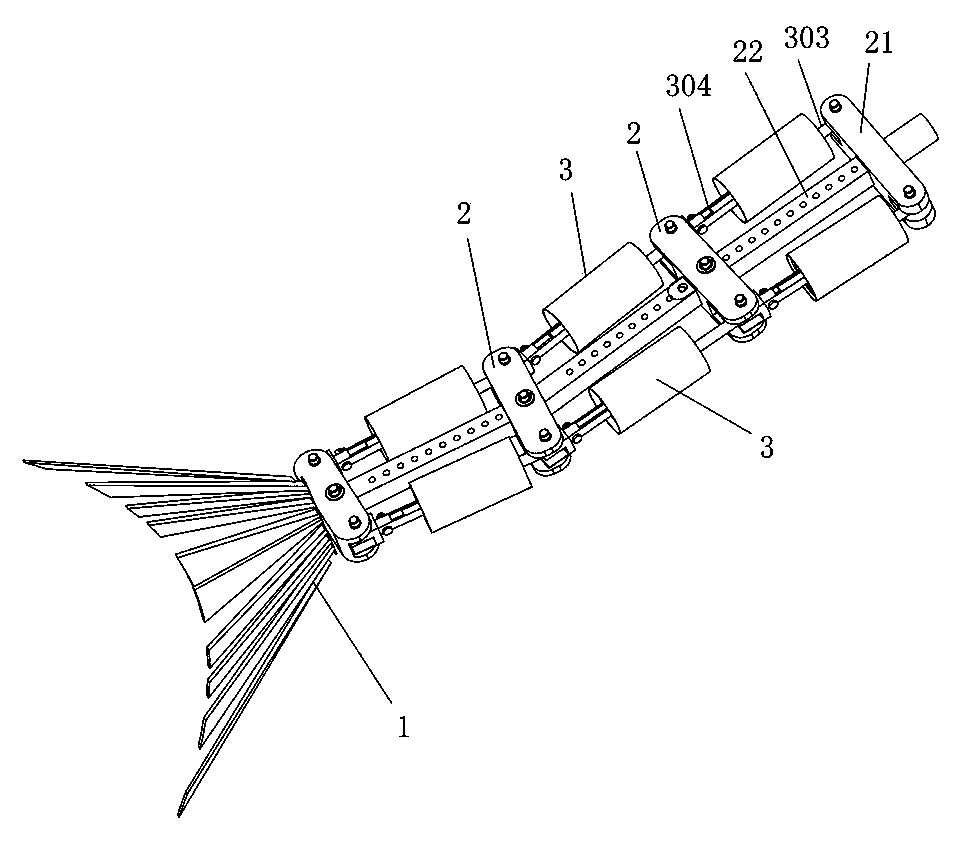
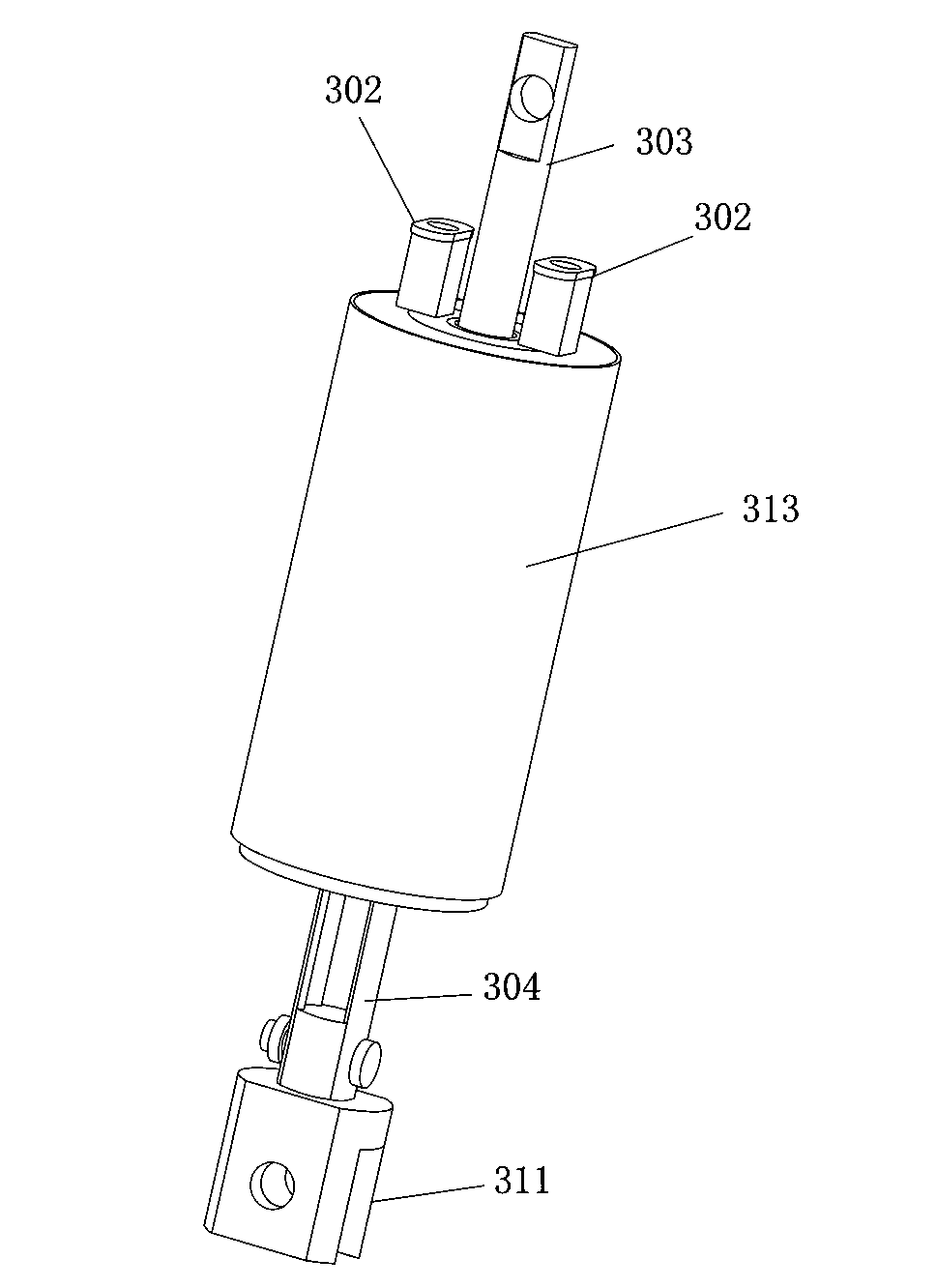
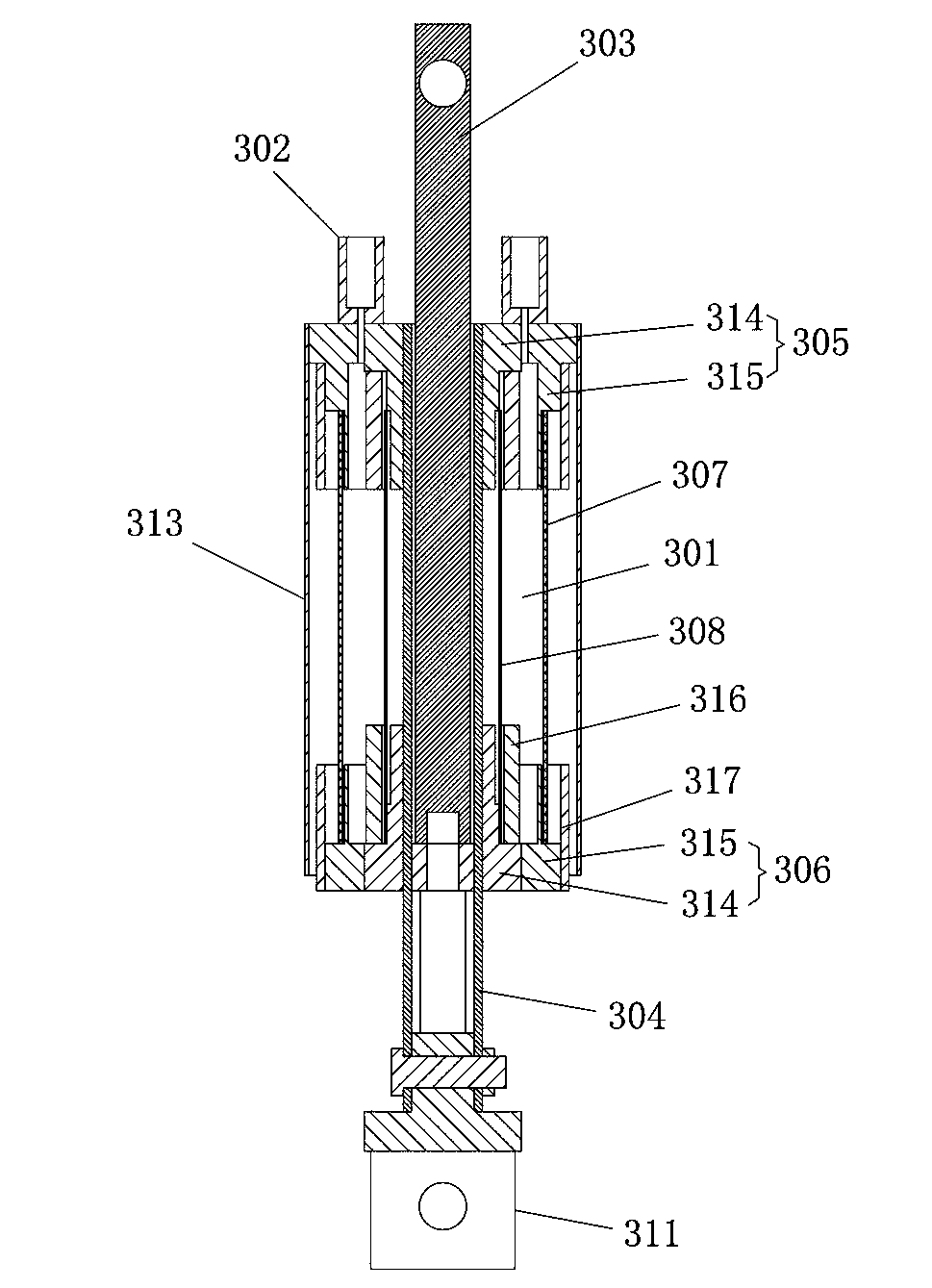
[0021] Such as figure 1 As shown, the bionic caudal fin underwater propeller based on hydraulic artificial muscles of the present invention includes a swing device with more than two sections, a tail fin 1 and a hydraulic control unit (not shown in the figure), and the swing device includes a T-shaped bracket 2 and a symmetrical arrangement Two artificial muscles 3 on the T-shaped bracket 2. see figure 2 , image 3 , each artificial muscle 3 includes a telescopic assembly, the telescopic assembly has an elastic hydraulic chamber 301 that can expand linearly in one direction through filling with liquid, and the telescopic assembly is provided with a joint 302 for connecting the elastic hydraulic chamber 301 and the hydraulic control unit. During operation, the joint 302 is connected with an external hydraulic control unit, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More