Robot navigation method based on three electromagnetic sensors
An electromagnetic sensor and navigation method technology, applied in the field of robot navigation, can solve problems such as low precision, many parameters, and complex design, and achieve the effects of improving accuracy, reducing the probability of introducing random errors, and simplifying design and measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0028] The robot navigation device includes an electromagnetic track, an electromagnetic sensor, a signal amplifier and a mobile controller, wherein,
[0029] The electromagnetic track is laid with enameled wire. The diameter of the enameled wire is 0.3mm. There is a sinusoidal alternating current with a frequency of 20kHz and a magnitude of 100mA±20mA in the enameled wire, which generates a 20kHz alternating electromagnetic field around the electromagnetic track.
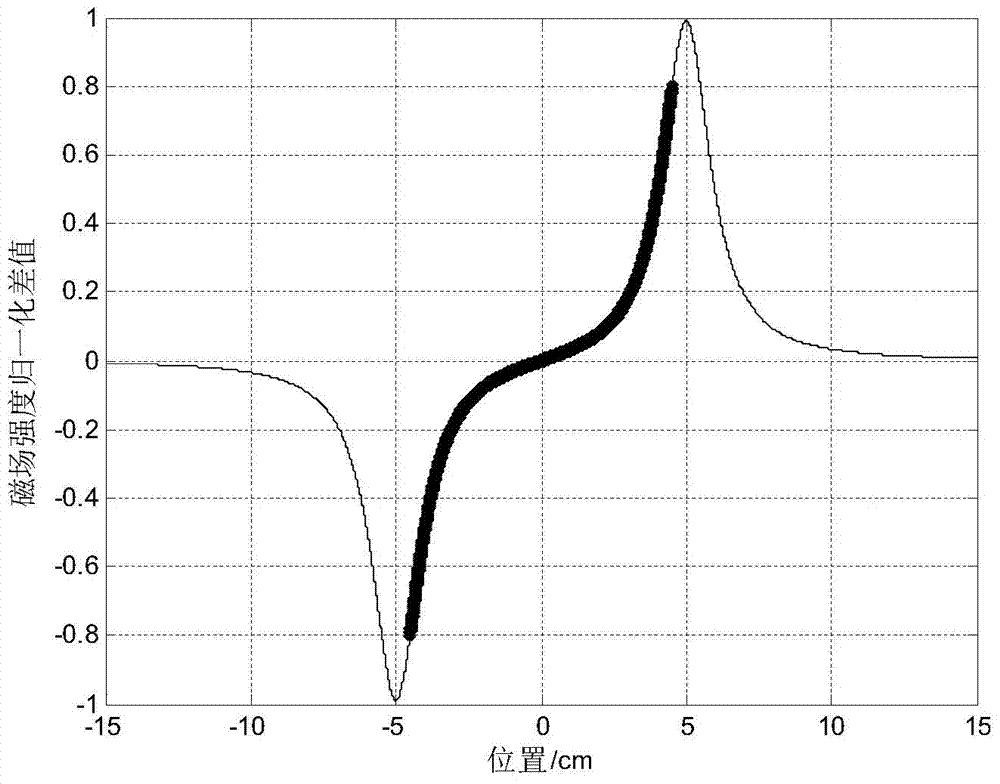
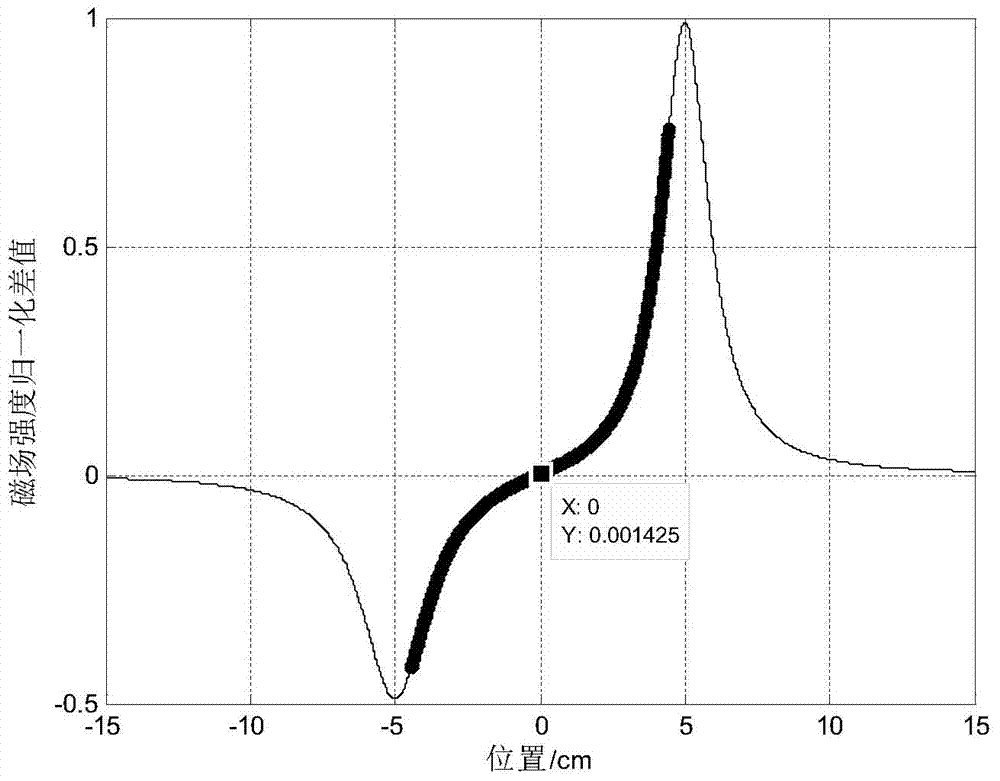
[0030] The electromagnetic sensor consists of three 10mH "I"-shaped inductance coils, arranged in a straight line and horizontally, and the distance from the left end to the right end is 10cm, such as Figure 5 , 6 shown. Each inductor is connected in parallel with a 6.8nF capacitor to form an LC tank with a resonant frequency of 20kHz. Since the frequency of the electromagnetic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



