

Gyroscope stabilized platform adaptive composite control method
A gyro-stabilized platform and composite control technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve problems such as out-of-control of the platform, rough adjustment of the fuzzy controller, frequent shaking of the platform, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention is described in detail below in conjunction with accompanying drawing and embodiment of description:
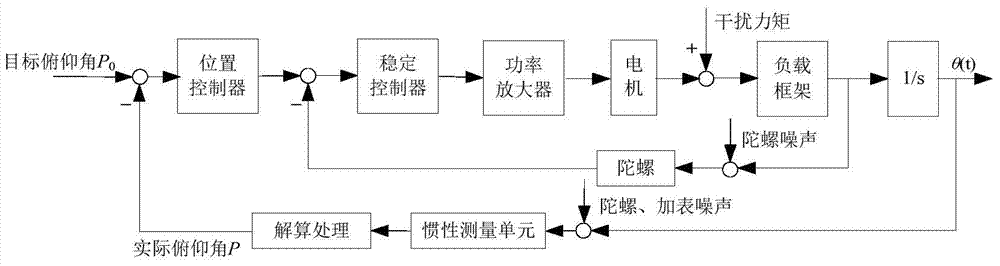
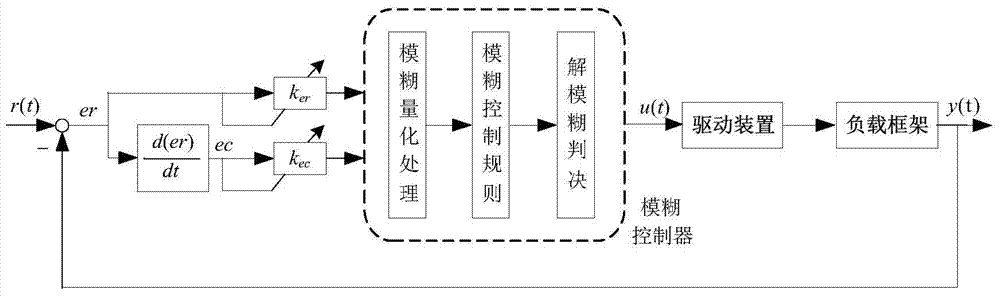
[0043] In the self-adaptive composite control method of the gyro stabilization platform of the present invention, the applied gyro stabilization platform adopts a double-loop control structure jointly controlled by the position loop and the stability loop, the position loop adopts proportional integral differential control, and the stable loop adopts adaptive fuzzy-proportional integral differential control compound control. The control methods in the pitch direction and the roll direction are the same, and now the control process in the pitch direction is taken as an example to illustrate the control method proposed by the present invention, and the specific steps are as follows:
[0044] Step 1) Set the desired pitch angle P of the gyro-stabilized platform 0 ;
[0045]Step 2) The inertial measurement unit is installed in the center of the inne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More