

Information fusion estimation method for asynchronous multi-rate non-uniform sampled observation data
A technology of observation data and uniform sampling, applied in the field of multi-sensor information fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described with examples below.
[0048] An asynchronous, multi-rate sensor, discrete-time linear dynamical system with N sensors observing the same target can be described as
[0049] x(k+1)=A(k)x(k)+w(k)
[0050] the y i (k i )=C i (k i )x i (k)+v i (k i ),i=1,2,…N
[0051] where x(k)∈R n is the state of the system at time kT on a scale of 1, and T=1 is the sampling period of sensor 1. A(k)∈R n×n is the system transfer matrix, w(k) is the system noise, modeled as a Gaussian distribution.
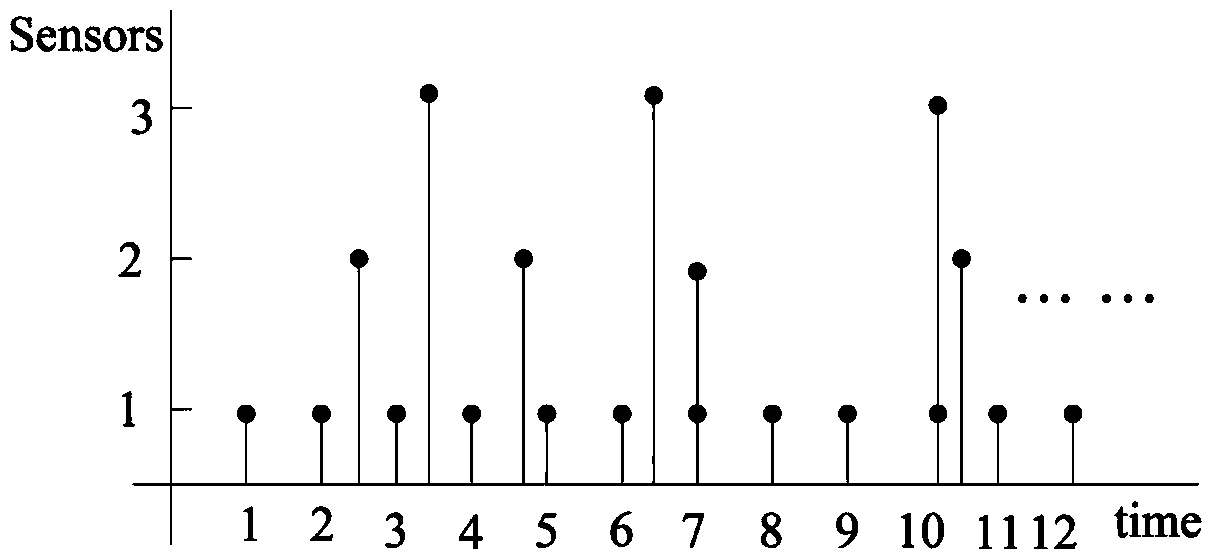
[0052] is sensor i at time t i the kth i measurements. The sampling period of sensor i is n of sensor 1 i times, here n i is a known positive integer. is the measurement matrix. x i (k i ) is x(k), k∈[n i (k i -1)+1,n i k i ] Coarse projection from scale N to scale i. When i=1, we think k 1 =k,x 1 (k 1 )=x(k). v i (k i ) is measurement white noise satisfying Gaussian distribution. The sampling between different ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More