

Non-linear navigation tracking control method for unmanned aerial vehicle
A control method and UAV technology, applied in three-dimensional position/channel control and other directions, can solve the problem of low accuracy of UAV route control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
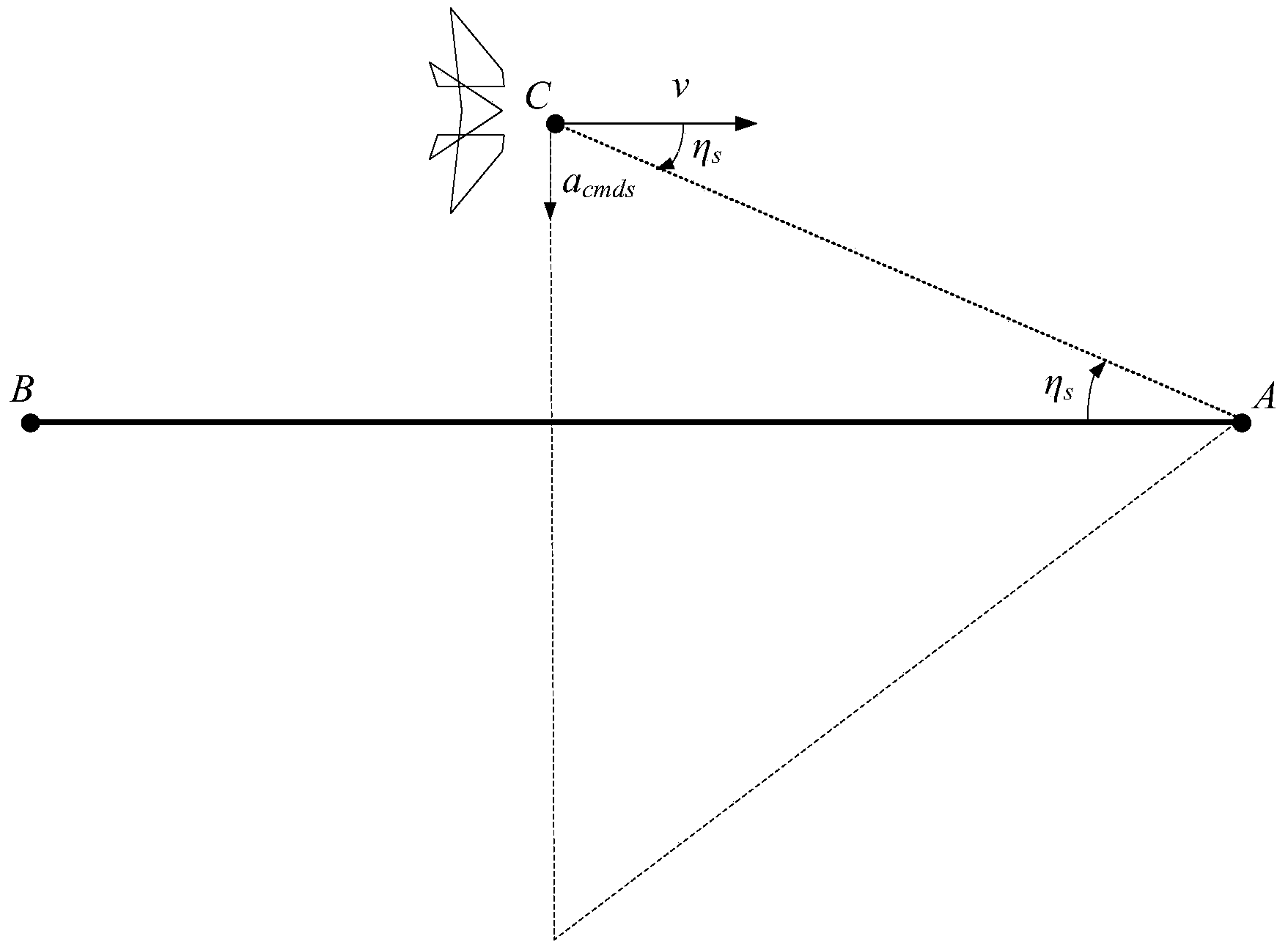
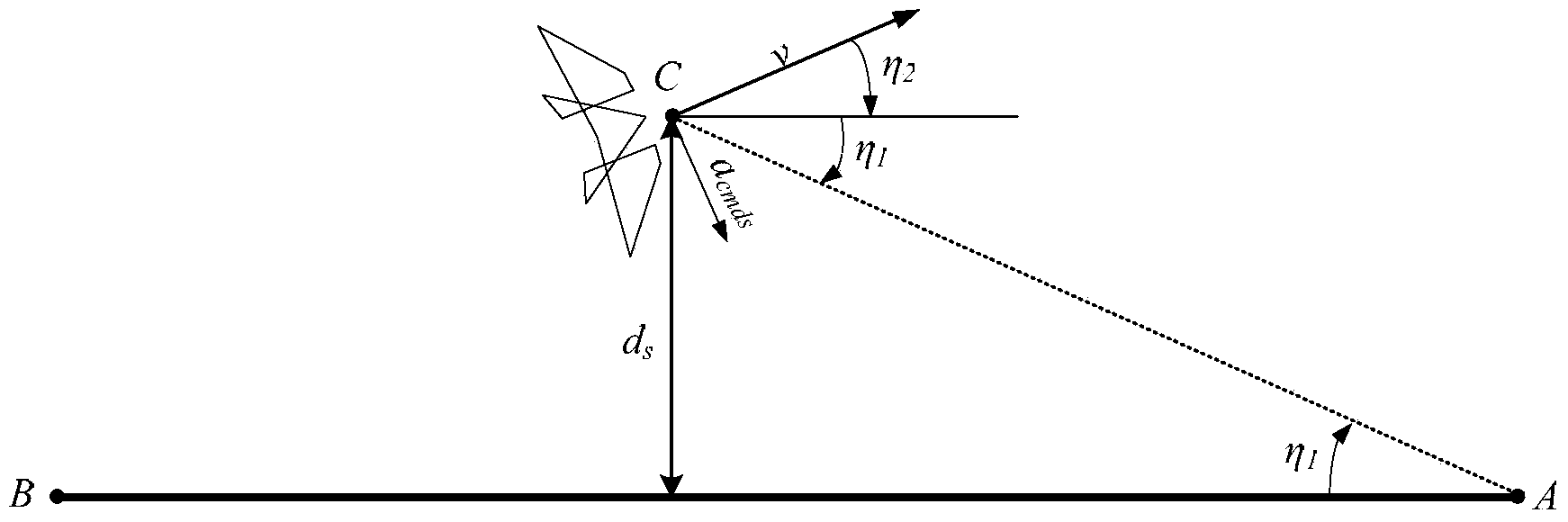
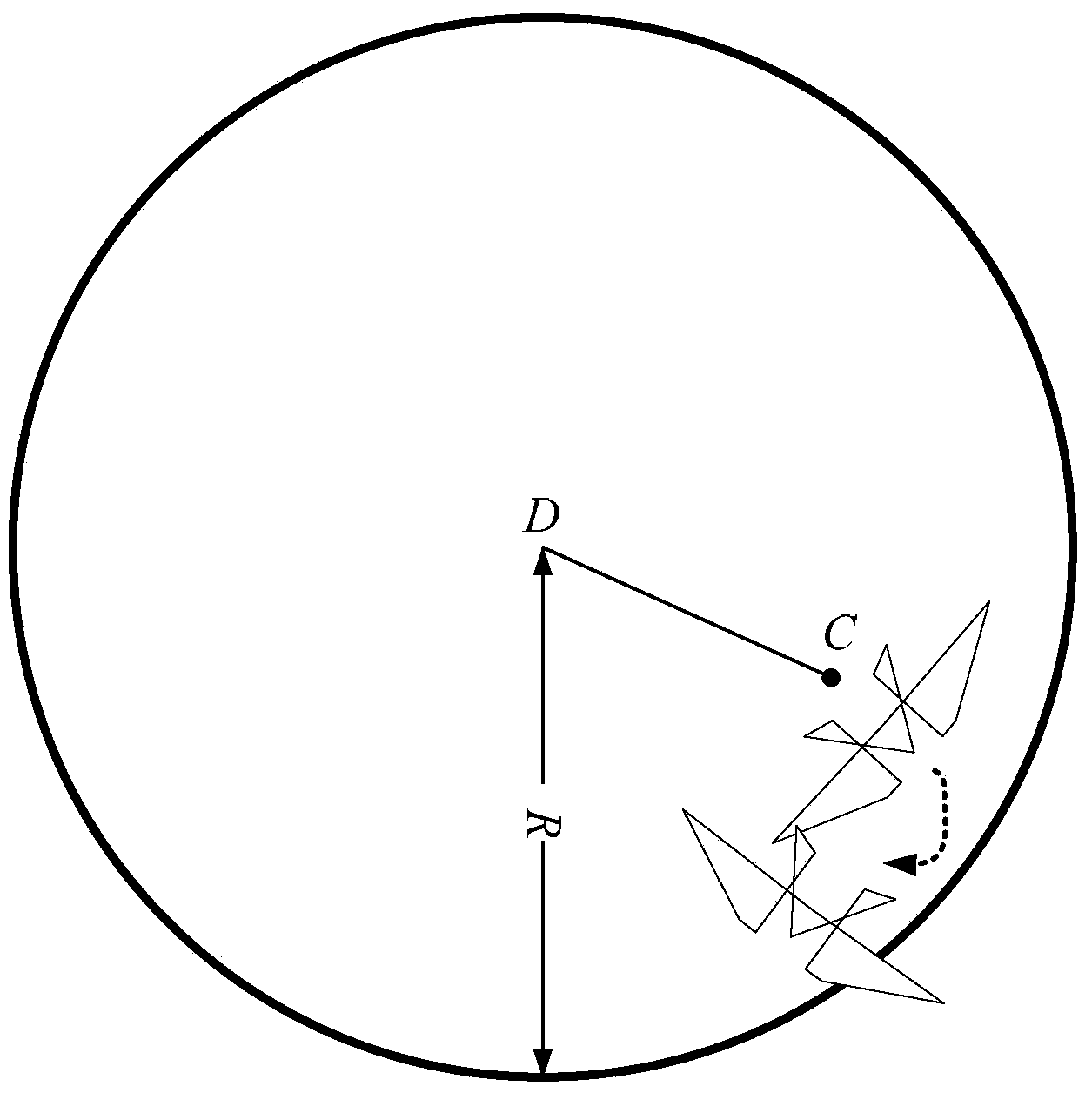
[0064] The non-linear navigation tracking control method of the unmanned aerial vehicle of the present invention, by obtaining the current geographic location and flight direction of the unmanned aerial vehicle, combined with the preset route, adopts nonlinear navigation and tracking control to calculate the lateral acceleration or the lateral acceleration of the unmanned aerial vehicle in real time centripetal acceleration, and calculate the navigation angle of the UAV, so as to ensure that the UAV can better realize the flight of the flight path when performing the set flight mission. Solution When the traditional PID algorithm is used for navigation and tracking control in the prior art, the PID parameters are often a compromise between proportional, integral and differential control functions, so that the calculated navigation angle changes linearly. Therefore, in complex route flight missions, the navigation angle obtained by the traditional PID algorithm cannot be adjuste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More