

SCARA robot trajectory tracking control method based on internal model
A trajectory tracking and control method technology, applied in the direction of control using feedback, can solve problems such as single adjustment parameters, and achieve the effects of simple system parameter adjustment, improved effect, improved trajectory tracking accuracy and anti-interference ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
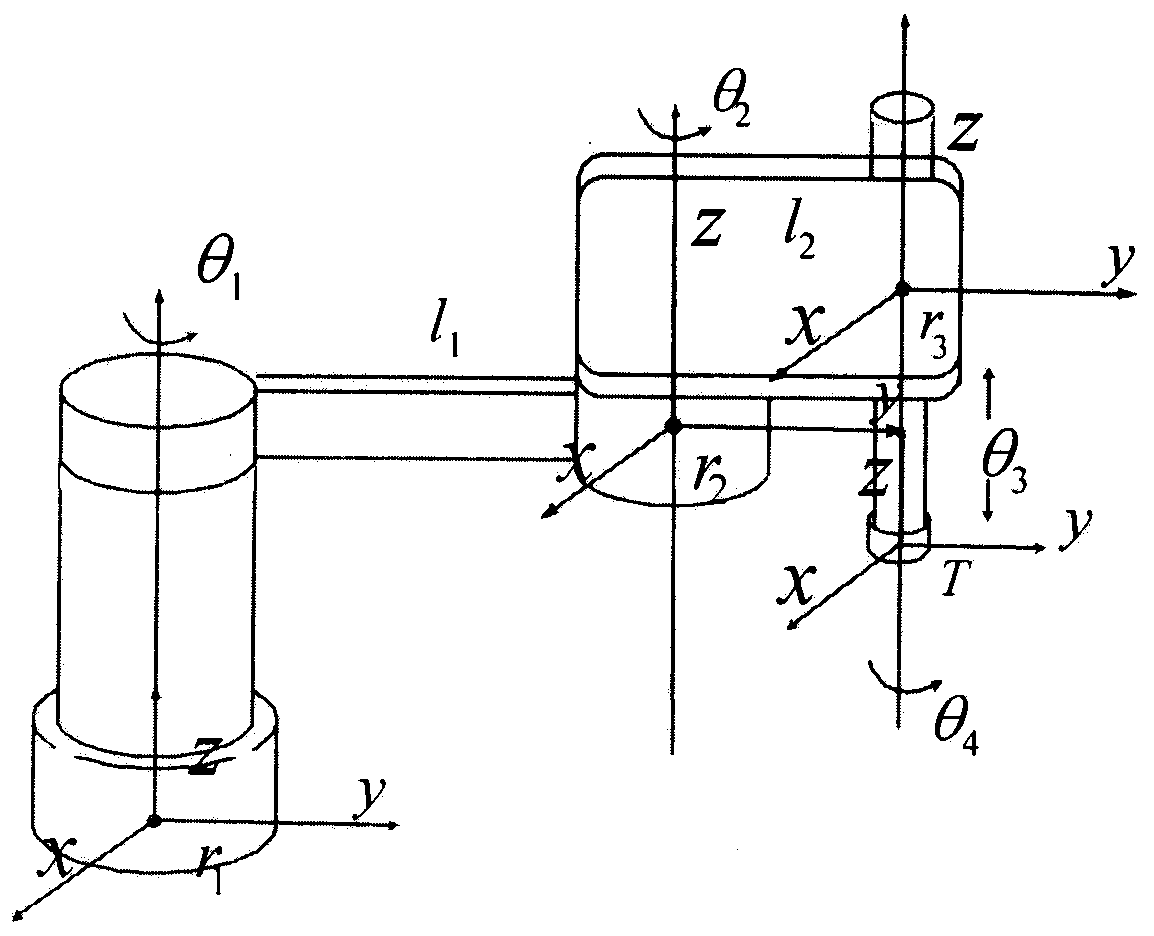
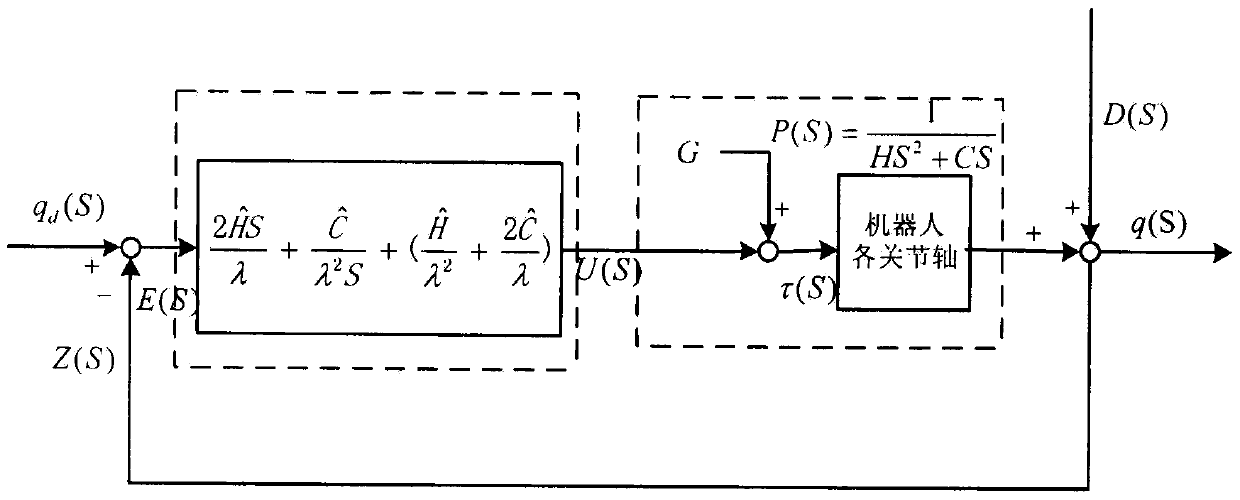
[0022] The basic idea of the present invention is to provide a trajectory tracking control method of a SCARA robot based on an internal model: it does not need to know the precise mathematical model of the controlled object; and it has strong robustness, high tracking accuracy, and fast tracking speed ; And the control structure is simple, and the parameter adjustment is single. The present invention first carries out dynamic model modeling to SCARA robot, obtains the estimated value of SCARA robot moment of inertia, centripetal force and Coriolis moment, gravitational moment; Use it as the estimation model of internal model pair object. Then, in order to ensure the stability and robustness of the system and make the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More