

Drivable region detection method based on laser radar
A technology of laser radar and driving area, which is applied in the field of traffic scene perception, can solve the problems of strict external environment requirements, difficult data processing, and inability to accurately detect drivable areas, etc., and achieve good real-time and ease-of-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in detail below in conjunction with the accompanying drawings.
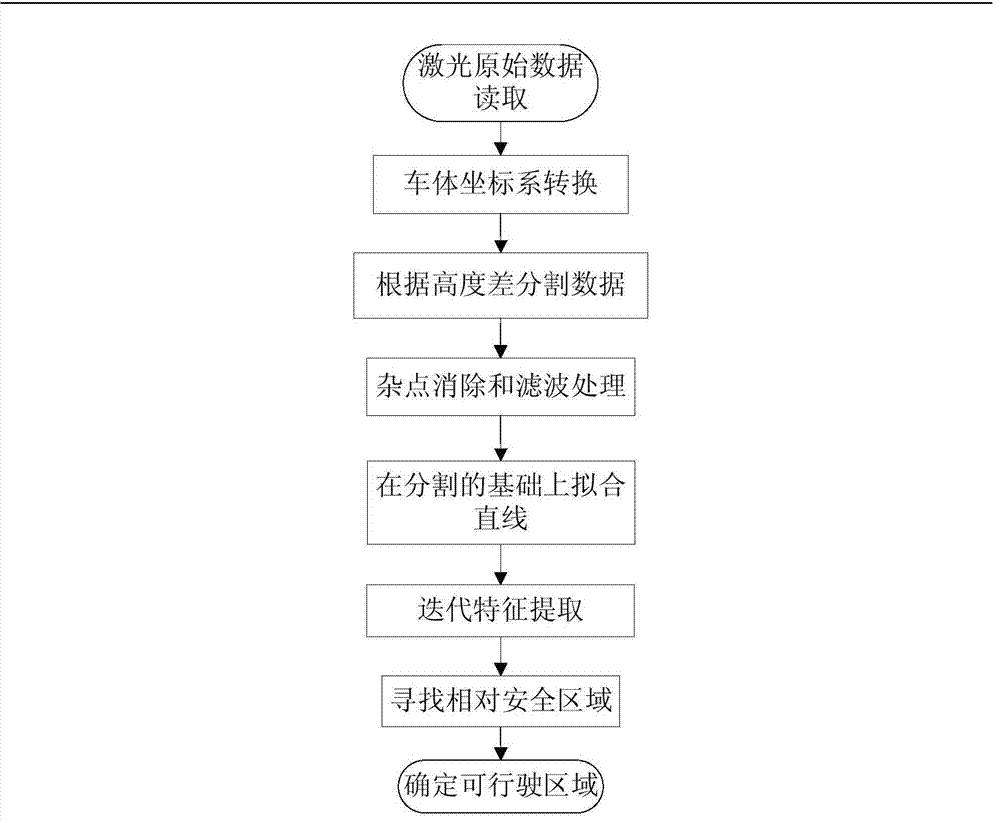
[0050] In order to be able to perceive the surrounding traffic scene in a real-time and stable manner, the present invention provides a drivable area detection method based on lidar data in an actual traffic scene, which specifically includes lidar calibration, data segmentation, noise elimination and data filtering, and feature extraction And determine the five parts of the drivable area, such as image 3 shown. The method is specifically carried out in the following steps:
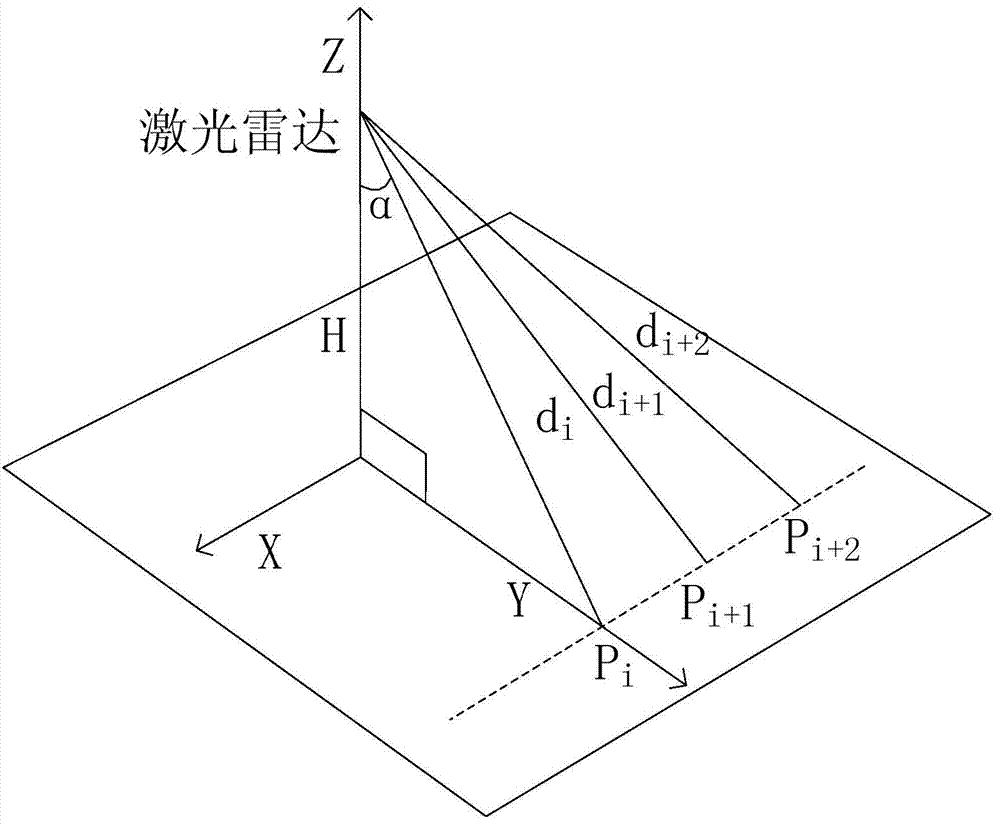
[0051] Step 1.1: In order to realize the function of detecting the driving area of the lidar, it is necessary to install the lidar directly in front of the front of the car, and scan obliquely downward to ensure that it intersects with the road.
[0052] At this point defined as figure 2 In the shown local space Cartesian coordinate system, measure the installation height H of the laser r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More