

Multifunctional robot end effector for working at heights
An end effector and high-altitude operation technology, applied in the field of robotics, can solve the problems of not developing an end effector, etc., and achieve the effect of simple structure, convenient connection and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
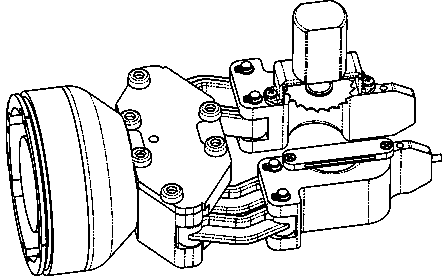
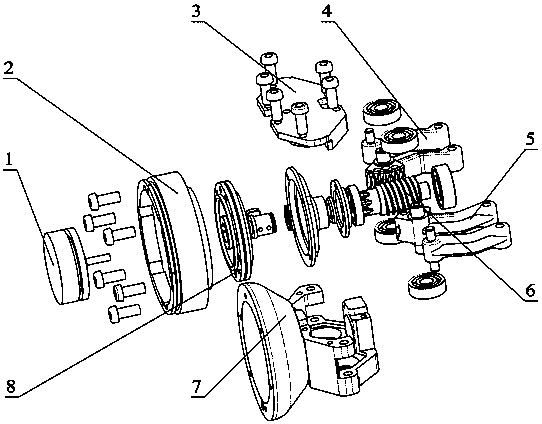
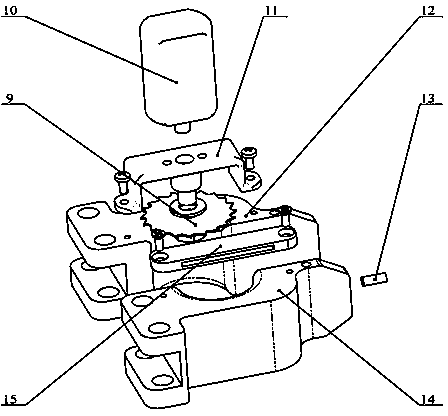
[0028] Such as Figure 1 to Figure 3 As shown, a robot multifunctional end effector for high-altitude operations, including a driving part and an executing part,
[0029] The drive part includes a front base 7, a rear base 2, a base cover 3 covered on the rear base 2, a worm 6, a worm wheel 5, a driven rod 4, a harmonic reducer assembly 8, and a drive motor 1. The driving motor 1 and the rear base 2 are fixed by fastening screws, and the motor shaft is connected with the wave generator of the harmonic reducer assembly 8 through a shaft sleeve; the input steel wheel in the harmonic reducer assembly 8 is connected with the The rear base 2 is firmly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More