

Adaptive learning control method of piezoelectric ceramics driver
A technology of adaptive learning and piezoelectric ceramics, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of low repeatability and accuracy of micro-displacement mechanisms, difficulties in the application of piezoelectric ceramics, and difficult real reflection Dynamic characteristics of piezoelectric ceramics and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The adaptive learning control method of the piezoelectric ceramic driver of the present invention includes the following steps:
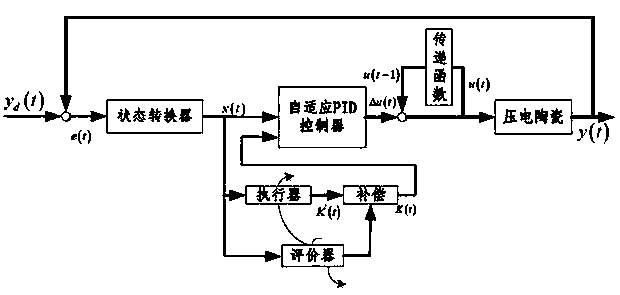
[0035] 1) First establish the dynamic hysteresis model of the piezoelectric ceramic driver, and then design the control method combining artificial neural network and PID;
[0036] 2) The self-adaptive tuning of PID parameters is realized online by using the reinforcement learning algorithm;
[0037] 3) A three-layer radial basis function network is used to approximate the policy function of the executor and the value function of the evaluator in the reinforcement learning algorithm at the same time;
[0038] 4) The first layer of the radial basis function network is the input layer, which inputs the system error, the first difference and the second difference of the error respectively;
[0039] 5) The executor in reinforcement learning realizes the mapping from the system state to the three parameters of PID;
[0040] 6) In reinforcement l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More