

Polar navigation ship strapdown inertial navigation system readjusting method based on horizontal coordinate system
A strapdown inertial navigation and abscissa system technology, applied in the field of navigation, can solve problems such as the inapplicability of traditional correction algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
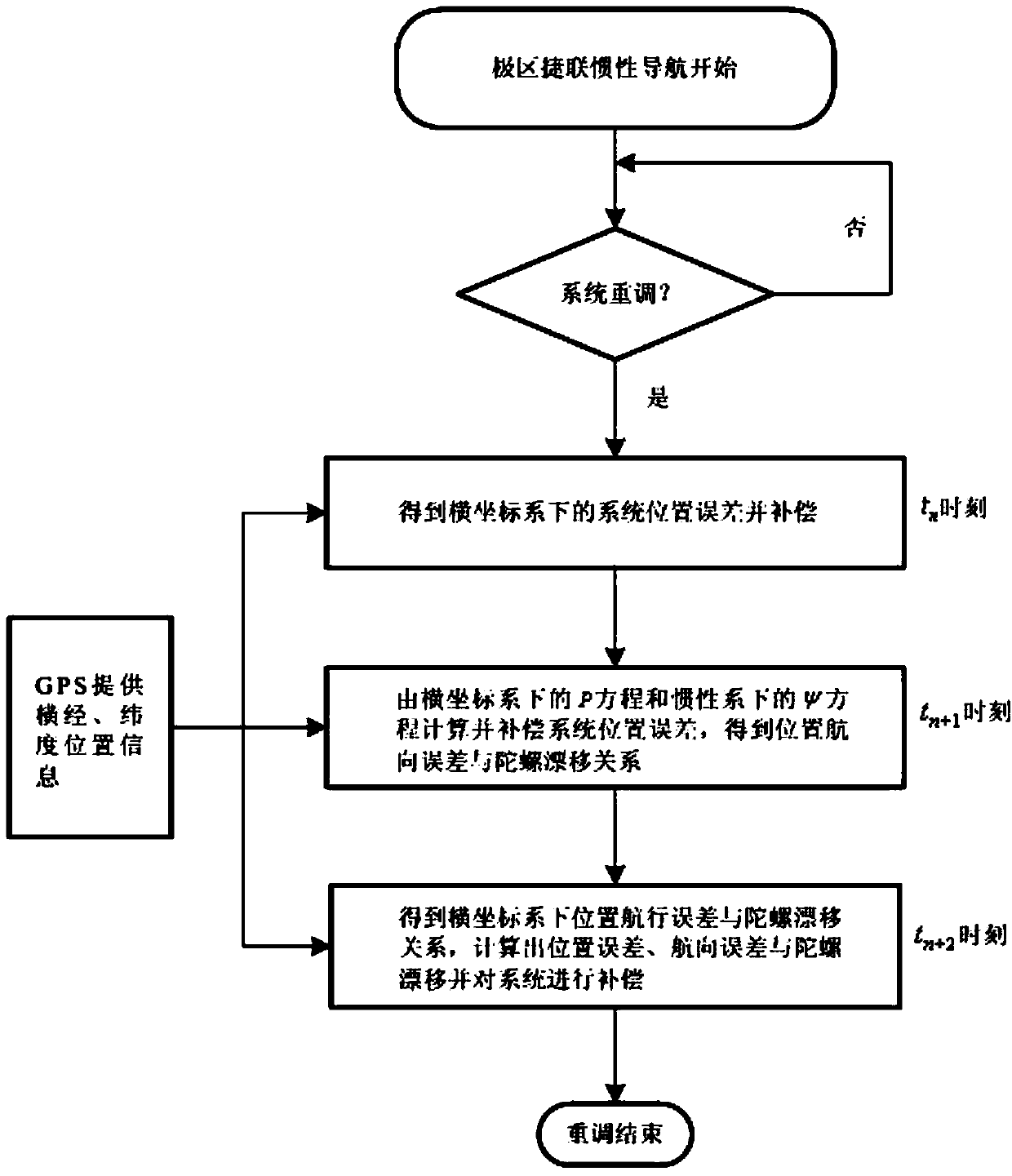
[0036] The present invention is described in more detail below in conjunction with accompanying drawing example:
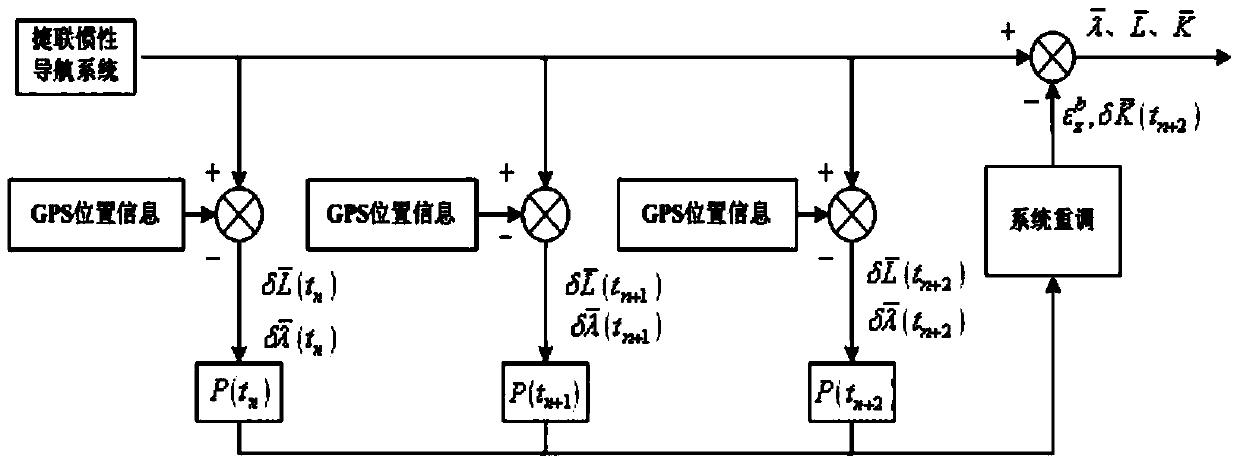
[0037] combine Figure 1~2 , the specific implementation of the present invention can be accomplished through the following steps:
[0038] Step one: at t n At any time, the position information provided by the external measuring equipment (such as GPS, etc.) is compared with the position information output value of the inertial navigation system to obtain the position error of the first point in transverse longitude and latitude position error After that, reposition the system. After retuning, there is
[0039] P ( t n + ) = 0 0 δ K ‾ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More